自适应前照灯的功能及实现
2. 2 AFS 的控制方案及硬件组成
2. 2. 1 AFS 的控制方案
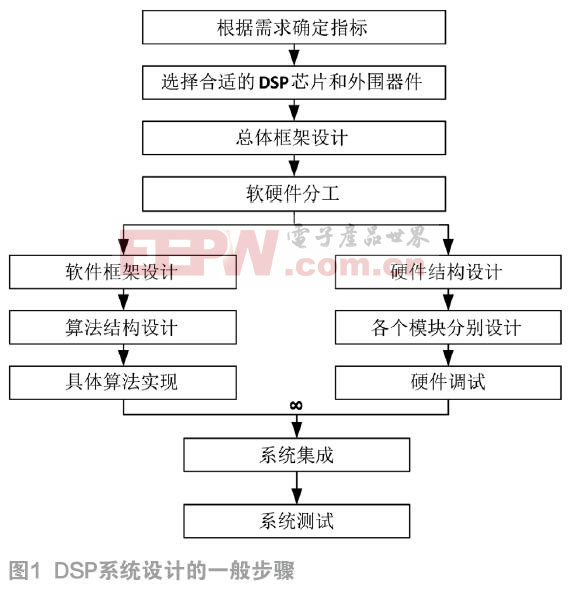
为了实现上述AFS 的各种照明模式,现提出如图9 所示方案。此方案中,AFS 由4 大部分组成,分别为传感器组、传输通路、处理单元和执行机构。此方案的基本思想是:中央处理器为实现汽车前照灯的自适应功能,需要首先通过传感器组采集光线、车速、转向、道路状况等信息,再由传输通路实时传输这些信息至中央处理器,中央处理器经过复杂的控制逻辑和算法,将得到的控制命令发给执行单元,再由执行单元做出最终反应,从而达到预期效果。
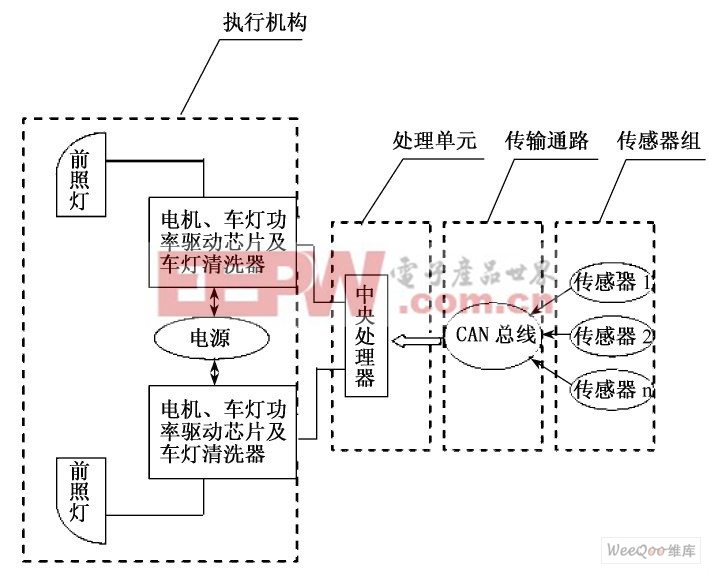
图9 AFS 的控制框图
2. 2. 2 AFS 的硬件组成
(1) 传感器组
传感器组包括光敏传感器、车速传感器、车身高度传感器、方向盘转角传感器、雨量传感器、雾传感器、风速传感器、颗粒物传感器、汽车位置传感器(GPS 信号)。
(2) 传输通路
选择CAN( Controller Area Network) 总线作为传输通道,CAN 总线常用于实现汽车内部控制系统与各检测和执行机构间的数据通信。通过CAN 总线还可以向其它电子模块索要本系统需要的相关资源及将本系统当前的一些信息发送给其他电子模块,从而简化系统结构,实现资源共享。对应于2. 2. 1 条提出的AFS 的控制方案,CAN 节点连接图如图10 所示。
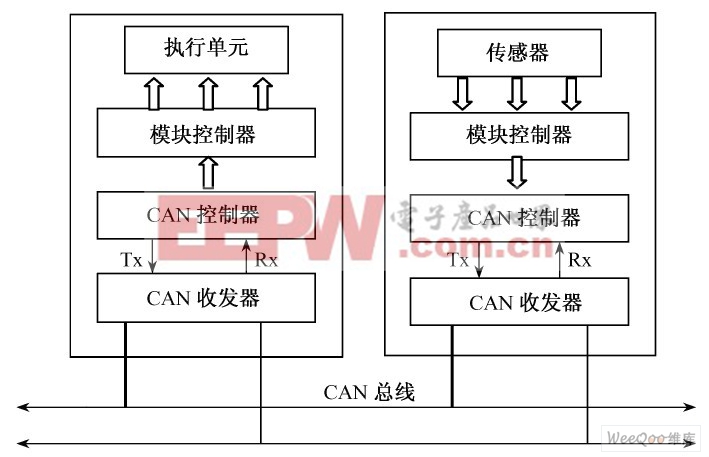
图10 CAN 节点连接图
(3) 处理单元及执行机构
在原理样机中,选择AT89S51 单片机来控制步进电机、车灯功率驱动芯片和车灯清洗器。图11 给出了步进电机的控制示意图,本系统共需4 台步进电机,左右前照灯每边各2 台,其中1 台步进电机控制垂直方向的转动,另1 台用于控制水平方向的转动。
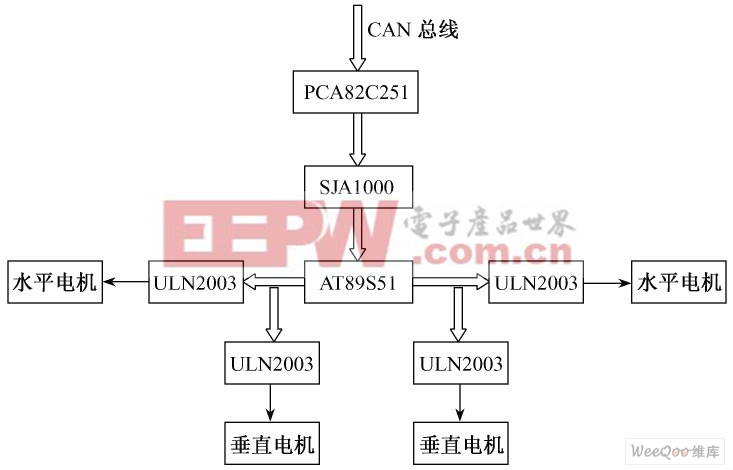
图11 步进电机控制示意图
3 结论
通过对AFS 的功能分析,提出了沙尘暴天气下的AFS 的照明功能,给出了可行的硬件实现方案。
当前的AFS 只有当车辆进入某种环境后才能根据传感器采集的相关信息对当前的驾驶环境做出判断,且只有当传感器收集的数据值在一定范围内才能做出反应,低于或高于此值AFS 将不予理睬。所以当前AFS 的及时性和可靠性有待进一步改进。本研究系统中预留了GPS 信号,通过对系统的扩展,不但对车辆所处的当前环境状况具有正确的判断,同时能对即将到来的环境状况有效地预知并提前做出反应。
它被称为预见型AFS,即P-AFS( Predictive-AFS)。譬如车辆在进入弯道之前,P-AFS 便能发现前方道路的状况,从而能提前开启弯道照明功能,且比传统的AFS 能更加准确地照射到弯道的中央。P-AFS 将成为我们下一步研究的主要方向。




评论