基于模糊PID参数自整定的温度控制系统的研究
4 仿真结果
4.1 建立系统Simulink仿真框图
在Matlab的Simulink环境下根据图2设计出系统的仿真框图。如图3所示。本文引用地址:http://www.eepw.com.cn/article/162084.htm
![]() ,模糊化因子ke=0.12,kec=0.02,解模糊因子K1=1.8,K2=0.03,K3=0.01,PID参数值KP=3.5,KI=0.025,KD=0.1。图4是常规PID控制曲线图和模糊PID控制曲线图。仿真结果表明,模糊PID控制方法较常规的PID控制,具有较高的控制精度,超调量小,控制效果好。
,模糊化因子ke=0.12,kec=0.02,解模糊因子K1=1.8,K2=0.03,K3=0.01,PID参数值KP=3.5,KI=0.025,KD=0.1。图4是常规PID控制曲线图和模糊PID控制曲线图。仿真结果表明,模糊PID控制方法较常规的PID控制,具有较高的控制精度,超调量小,控制效果好。
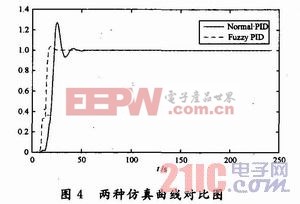
仿真显示采用Fuzzy-PID算法,没有振荡并且超调量小,从仿真的结果可以看出,常规PID算法调节时间为55 s,而模糊PID的调节时间是27 s,常规PID的超调量是26%,而模糊PID的超调量是1.27%,明显优于传统的PID算法。
4.3 温度控制系统实际控制效果
将常规PID和模糊PID参数自整定算法用于温度控制系统中,以及加入相同的干扰后对控制效果的影响,其温度控制实验曲线如图5,图6所示。
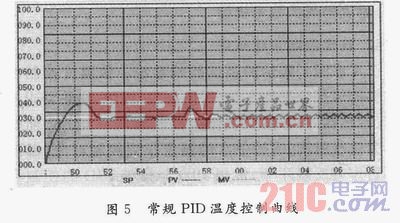
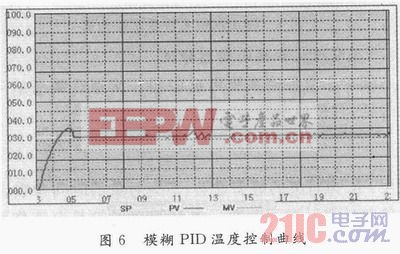
从温度控制系统的实际控制结果看出:常规PID算法调节时间为4.4 min,而模糊PID的调节时间是2.1min,常规PID的超调量是10%,而模糊PID的超调量是6%;在加入相同干扰的情况下,系统恢复稳定的时间,常规PID是2.7 min,模糊PID是0.9 min。
5 结语
温度控制系统具有非线性、时变性和滞后性的特性,并且锅炉水温控制系统中的循环水也是强干扰,增加了系统控制的复杂性,常规PID控制效果不太理想,而模糊PID参数自整定控制算法对于解决温度系统中的非线性、时变性和大延时起到明显的改善效果,对干扰也具有较好的抑制调节能力。

















评论