基于模糊PID参数自整定的温度控制系统的研究
2.2 温度控制系统的模型特性
锅炉水温控制系统可近似用一阶惯性纯滞后环节来表示,其传递函数为:
式中:K为对象的静态增益;T为对象的时间参数;τ为对象的纯滞后时间参数。本系统选用的是温度作为控制对象,锅炉的温度控制系统是常见的确定性系统,针对以上的温度控制系统得到锅炉温度控制系统的传递函数为:

从图1可以看出,锅炉中的水是不断流动的,循环水对加热丝加热锅炉中水的温度是一个很强的干扰,增加了系统的复杂性,加大了控制难度,而一般常规的PID控制效果不太理想,所以对锅炉水温度控制系统采用模糊PID控制算法。
3 模糊PID控制算法
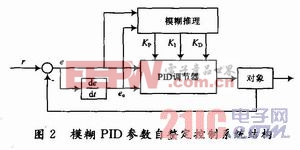
3.1 模糊PID参数自整定系统结构
采用模糊PID参数自整定控制方式,首先要找出PID三个参数与控制偏差e和偏差的导数ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理来对三个参数进行修改,以满足不同e和ec对控制参数的不同要求,从而使被控对象有良好的动静态性能。即e,ec作为模糊控制器的输入,PID三个参数作为输出系统结构图如图2所示。本文引用地址:http://www.eepw.com.cn/article/162084.htm
3.2 PID参数的整定原则
按照系统时时变化的偏差e和偏差变化率ec,根据经验,KP,KI,KD的整定原则如下:
(1)当偏差e较大时,误差较大,为使系统有较快的响应速度,应取较大的KP;为了防止偏差变化率ec瞬时过大,应取较小的KD;为了避免较大的超调,应对积分作用加以限制,通常取KI=0。
(2)当偏差e处于中等大小时,为使系统相应具有较小的超调,KP应取得小些,KI取值要适当,这时KD取值对系统影响较大,取值应大小适中,以保证系统的响应速度。
(3)当偏差e较小时,为使系统具有较好的稳定性,KP与KI均应取大些,同时为避免系统在设定值附近出现振荡,并考虑系统的抗干扰性能,应适当地选取KD值。KD值的选择根据偏差变化率ec来确定,当ec较大时,KD取较小值,当ec值较小时,KD取较大值,一般情况下,KD为中等大小。
3.3 模糊PID控制器
设定输入变量e和ec语言值的模糊子集为{NB,NM,NS,Z,PS,PM,PB),将偏差e和偏差变化率ec量化到(-3,3)的区域内。同样,设定输出量KP,KI和KD的模糊子集为{ZO,PS,PM,PB},并将其量化到区域(0,3)内。根据参数KP,KI和KD对系统输出特性的影响情况,可得模糊控制规则为:

















评论