基于DSP闭环控制的单相逆变器的研究
数据表计算公式如下:
其中tk为第k个方波脉冲的宽度,M2为调制比,ω为工频角频率,Tk为第K时刻的时间值(K=0~199)。
根据DSP的工作时钟20MHz,则算得定时器的周期寄存器的值为500。根据以下定标公式计算数据表的值直接存入FLASH:
Datak就是在[Tk,Tk+1]区间驱动信号的相对触发时刻值。
高频逆变驱动电路采取移相控制方式。K1、K2组成超前臂,K3、K4组成滞后臂,分别超前Tm。开关管导通的时间分别为TK1、TK2、TK3、TK4。
工频变换器电路也采取移相控制方式。Q5、Q6组成超前臂,Q7、Q8组成滞后臂,分别超前Tn。开关管导通的时间分别为TK5、TK6、TK7、TK8。
由于tk经PID调节器反馈控制的参数,所以引起TK(K=1,2,3,4,5,5,6,7,8)也随之变化,实现实时闭环控制。
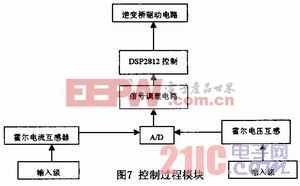
采样电压和电流通过接口电路,经转换,输入DSP的A/D,并用DSP实现数字PID调节器,使逆变器根据负载的变化,实时根据误差信号计算出相应的控制量△k,经对DSP编程,根据△k的大小,查找对应不同的调制比的SPWM数据表,从而达到闭环控制的目的。把给定的电压与,电流大小与反馈的电压和电流大小比较,调节输出SPWM脉冲宽度从而控制驱动电路,注意:一定要使能DSP内EV扩展控制寄存器中的REVSOCE位,采用周期中断启动ADC,系统进入闭环控制。
数字PID调节器算法如下:
ek为第K步误差值,uk为第K步控制量,u0为初始控制量,Ik为积分项,三个系数kp、kl、kD由参数整定得到。
同时通过传感器检测过热、过流等信号,经信号调理电路变成相应的方波信号,被DSP的事件管理器捕获单元捕获,检测到的PDPINTx电平的变化产生INT1中断,在200ns内终止所有的驱动信号。其具体控制过程如图7所示。本文引用地址:http://www.eepw.com.cn/article/161960.htm
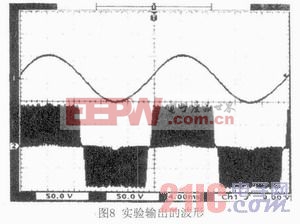
4 实验结果
通过不断的实验,最终得到了满意的结果,图8示出了实验输出波形的结果,通过周波变换反相和滤波电路后得到相应的正弦波形。输出电223V与标准电压220V相比,其偏差为+1.3%5%;1输出波形频率为50.08Hz,其偏差为0.2Hz,达到标准频率要求。经滤波后THD为1.8%。
5 总结
通过利用TMS320F2812的事件管理器来实施单相逆变器的闭环控制,动态性能极大提高,同时DSP算法参数的整定关系到整个系统的正常工作,是有效实现过压、过流等保护的前提条件。还有,选择好传感器是实现过压、过流保护的关健。











评论