基于模糊控制的阀门定位器设计
根据实际情况,采用最大隶属度法进行解模糊判决。定义Kp,KI,KD参数的调整算式如下:
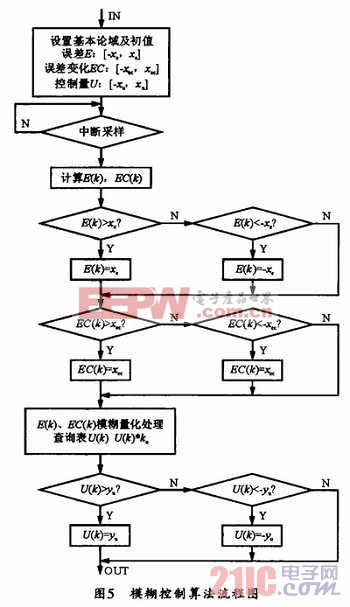
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理,查表和运算,完成对PID参数的自校正,流程图如图5所示。其中:E:误差,EC:误差变化,U:控制量,kU:比例因子。本文引用地址:http://www.eepw.com.cn/article/161878.htm
3 结束语
本文主要讨论了模糊控制算法在阀门定位器中的运用以及所用的微控制器和所涉及的外围电路设计,在工程实践中表明这些方法都是可行的。但是由于工业现场环境的干扰,控制精度有待进一步的提高,而且算法还是可以进一步优化,在后续的研究中,可以尝试用神经网络等控制方法进行更深入的研究。



















评论