基于MCL算法的无线传感网络节点定位技术
1.2 位置预测
在MCL算法位置预测阶段,节点从前一阶段计算出的一组可能位置Lt-1开始,对每个采样值应用节点移动模型从而获得一组新的采样值Lt。假设节点的移动速度和方向未知,而只知道其速度值小于Vmax那么,如果lit-1是节点的一个可能位置,那么节点所在的当前可能位置则位于以lit-1为圆心、半径为Vmax的圆形区域内。如果用d(l1,l2)表示两点l1和l2之间的欧几里德几何距离.而且节点的移动速度在区间[0,Vmax]上服从均匀分布,那么节点基于先前位置的当前位置估计的概率分布可以通过以下均匀分布的形式给出。

因此,在预测阶段计算出的节点可能位置序列R就是以点集Lt-1中的任意一点为圆心且半径为Vmax的圆形区域。
1.3 位置滤波
在滤波阶段,节点需要根据所获得的新观测值滤除不可能的位置信息。为了便于描述和分析,假设在t时刻每个位于信标节点无线射程范围内的节点都可以侦听到来自信标节点的位置信息广播。在实际的网络部署情况下,需要考虑网络冲突并解决消息丢失的问题。
如图1,节点在t0时刻由位置l0开始移动,并在t1时刻到达位置l1,节点离开区域I并到达区域Ⅱ,但始终在区域Ⅲ内。到达节点和离开节点都为节点的位置估计提供信息,节点知道在t0时刻位于以如为圆心且半径为r的圆形区域内的信标节点,在t1时刻并不在l1为圆心且半径为r的圆形区域内。
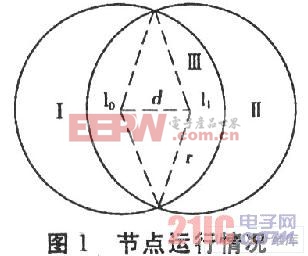
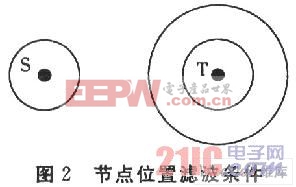
图2描述了节点的位置滤波条件。图中。S表示节点N能侦听到的所有信标节点分组。T表示节点N的邻居节点可以侦听到而节点N本身无法侦听到的全部信标节点。因此,节点位置l的滤波条件可以由式(2)表示。

如果滤波条件为假,那么节点位置的概率分布p(lt|Ot)值为零,否则p(lt Ot)将符合均匀分布,这样.就可以从节点的所有可能位置集合中去除那些与观测值不一致的位置。经滤波后,节点剩余的可能位置也许会少于N个。预测过程和滤波过程将不断重复进行,并结合已经发现的节点可能位置,直至获得节点的至少N个可能位置。
1.4 重要性采样
算法的最终目标是估计节点可能位置的后验概率分布p(lt|O0,O1,…Ot)。首先,通过一个标准化重要性采样函数π获得一系列相互独立的节点位置采样值;然后,对每个采样值的权重值进行调整并且使用这些权重值对节点所在可能位置的后验概率分布作出估计。算法采用了下列递归式重要性函数。

式(3)表示节点的位置预测,节点借助先前所在的可能位置预测其当前的可能位置。式(4)表示节点的位置更新,节点根据获得的观测值对新的采样值不断进行权重值更新与调整。然后。通过式(5)对权重值Wit;进行归一化处理得到Wit用权重值序列(lit,wit)对节点位置的后验概率分布作出估计。通过式(3)和式(4)的反复计算,很容易地确定概率值p(lk|lk-1)和p(l1|Ot)的大小。










评论