多参数桥梁振动监测系统设计
2.3 CAN通信接口设计
本文采用STM32系列的Cortex-M3内核控制器,其片内自带了满足CAN2.0A与CAN2.0B协议的硬件通信接口,并使用CTM8251AT隔离型CAN收发模块完成了CAN总线的高速数据通信功能。以下为CAN波特率的计算:
BodeRate=PCLK1/CAN_Prescaler/(CAN_SJW+CAN_BS1+CAN_BS2)
由于CAN是挂接在APB1总线上,因此采用时钟PCLK1,当PCLK1=72 MHz时,波特率为=72/9/16=0.5 MHz,CAN_Prescaler的预分频值为1~1024。
在进行CAN组网布线时,需要注意的是,在中远距离应采用120 Ω特征阻抗双绞线,通信距离大于600 m以上,选用线径大于0.75 mm2的电缆,超远距离线径应大于1.5 mm2。而且CAN总线的通信速率是随着通信距离的增大而降低的,通常在1 km时,最高波特率为35 kb/s,2 km时为18 kb/s,当距离大于5 km则必须增加CAN中继器,否则无法正常通信。
3 实测数据
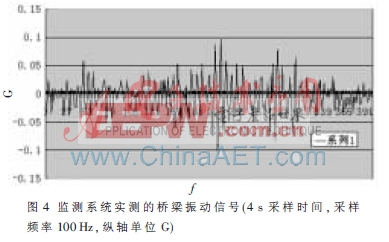
如图4为桥梁振动系统实测得到的纵向垂直振动加速度信号。本系统中还采用了DHT22型号的温湿度检测模块与PH100SX型风速风向传感器,这两类传感器和输出都是数字信号,接口设计简单,限于篇幅不再赘述。本系统的实际指标如下:
在线调节传感器采样率范围为1~100 Hz;
在线调节传感器放大倍数为1,2,4,8,16,32,64,128;
加速度测量范围为0~±1.7g,最大灵敏度为1 mg;
加速度数据非线性度小于0.5%;
严格同步双轴振动数据测量;
单路CAN最大节点数为60,CAN组网可达600个节点以上。
本文所研制的多参数桥梁振动监测系统能够实现长时间无人值守的实时双轴振动信号采集、温湿度采集以及风速风向测量等功能。监控中心通过GPRS网络获取各监控桥梁的状态信息,并自动根据桥梁状态信号实时报警。该系统还可以应用于大型建筑体,拦河大坝等大型结构体的远程健康状态监控。
参考文献
[1] 高占凤,杜彦良,苏木标.桥梁振动状态远程监控系统研究[J].北京交通大学学报,2007,31(4):45-48.
[2] 杜辉. 基于CAN总线的矿井通风监测系统[J].计算机工程与设计,2009(15):3565-3567.
[3] 杨海艳,孟彦京,李伟冰,等.振动传感器特性及其在风力发电机中的应用[J].传感器世界,2009(2):27-31.
[4] 鹿麟,林凌,李刚. ADXL203型双轴加速计在倾斜度测量中的应用[J].国外电子元器件,2007(7):61-64.
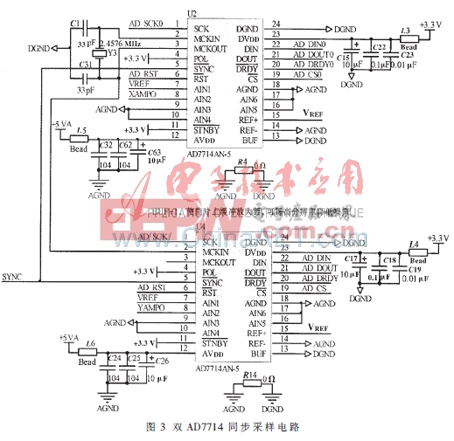
[5] 吴永忠.高性能模拟前端AD7714及其应用[J].电子工程师,2006,32(8):56-59.













评论