基于PID控制粉尘浓度测量仪的实现
3.3 PID参数的设定
PID控制参数的设定是控制系统设计的核心内容,它是根据被控对象的特性确定PID控制器的比例系数、积分时间和微分时间的大小,确保其在系统受到扰动后仍保持稳定并将误差保持在最小值。
3.3.1 PID参数的初始值
Ziegler Nichols方法是基于简单被控过程的Niquist曲线的临界点计算PID参数初值,其整定准则是要求系统的暂态过程衰减率为0.75,该算法简单,使用方便。本文采用4:1的衰减比性能准则获得PID参数的初始值。
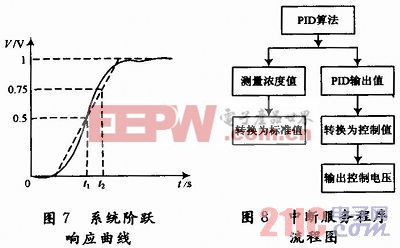
设控制系统有一响应曲线,如图7所示,给系统加一阶跃输入U,可用一阶延时系统近似为:
式中:K为放大系数;τ为滞后时间;T为时间常数。
设输出值达到设定值的50%和75%时所用的时间分别为:t1和t2,则PID参数的初始值可表示为比例系数Kp=1.2U/(RL),积分时间常数TI=2L,微分时间常数TD=0.5L。其中:斜率R=(0.75-0.5)V/(t2-t1),滞后L=t1-(2V0-4V1)(t2-t1)/V。本文引用地址:http://www.eepw.com.cn/article/161575.htm
3.3.2 PID的自校正调节原理
本文利用测量误差改变调节器的步长,实现PID参数的自动整定,使输出值平稳快速地达到设定值。首先将采样值与给定值的误差绝对值分成若干个区间,各区间设定不同的步长,采用不同的计算式。这里PID参数的调整周期应小于采样周期,采样周期由整个放大电路的传输延时和后续A/D转换器的性能指标决定。
3.4 中断服务程序
中断服务程序流程图如图8所示。
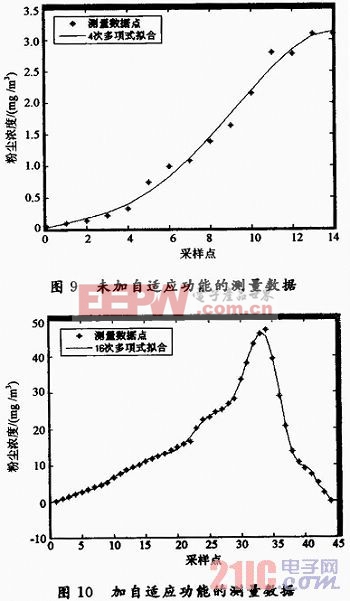
4 实验结果与分析
实验时对烟雾释放出的粉尘浓度进行了测量。图9和图10分别是未加自适应测量功能和加了自适应测量功能测得的粉尘浓度值及其拟合曲线。图中“*”是采样得到的粉尘浓度值;“——”是用Matlab对测得的数据点进行拟合后的曲线。由图9可以看出,当粉尘浓度达到3.1 mg/m3时,浓度不再变化,仪器达到饱和。由图10可知:浓度较低时,仪器的响应曲线线性度较好,能够完整地反应粉尘浓度的变化过程,可测得48 mg/m3的浓度值,测量范围大大地扩大了。采用PID加以控制,数据的平滑度较好,几乎没有超调,测量值能够平稳的上升,达到了预期的效果。
5 结语
通过实验验证,采用这种自适应测量的方法可以使测量范围达到0.01~48 mg/m3。采用PID参数的自校正调节,可以使测量曲线平稳地过渡到设定值。PID控制结果几乎没有超调,稳定时间短,在设定的目标角度值附近振荡少,有效抑制了调节传感器接收灵敏度时引起的振荡。



















评论