基于激光测距技术的车辆宽高检测系统的设计
3.1 主控制器模块设计
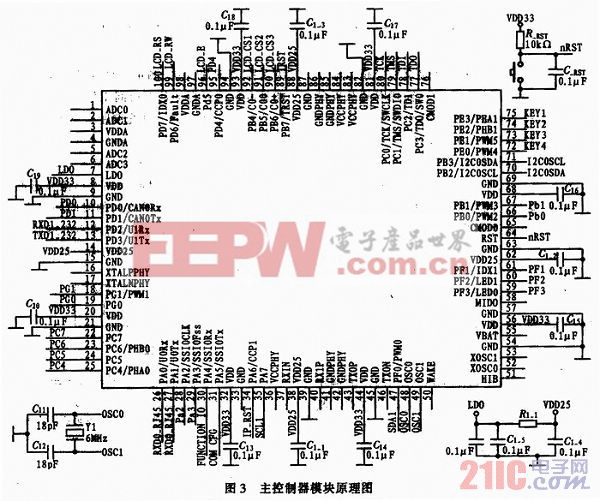
采用ARMCortex-M3内核的微控制器LM3S8962作为系统控制核心。Cortex-M3内核采用ARMv7-M架构,它紧凑地结合Thumb-2指令集,采用哈佛处理器架构,与ARM7TDMI相比,比Thumb指令每兆赫的效率提高了70%,比ARM指令提高35%。由于Thumb-2指令是Thumb指令的扩展,16位和32位指令共存于同一模式下,复杂性大幅下降,代码密度和性能均得到提高。LM3S8962时钟频率高达50 Hz,多达36个中断源具有8个优先等级,提供系统时钟,256 kB的FALSH,64 kB的SRAM,休眠模块,通用异步收发器,通用定时器,PC接口以及其他丰富的外设接口,可方便的对各种现场设备进行有效控制。图3为LM3S8962的外设接口及其外围电路(时钟、复位、UART接口等)。本文引用地址:http://www.eepw.com.cn/article/161163.htm
3. 2 数据通讯模块设计
将激光传感器扫描得到的极值坐标信号通过通用异步收发器(UART)传送给微控制器,选用了MAX232进行RS232电平转换,如图4所示。
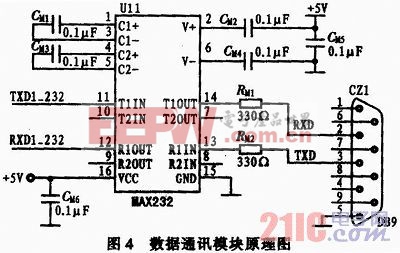
LM3S8962具有两个串行接口UART0和UART1。本系统选用UART1用于RS232通信使用。UART是一种应用广泛的短距离串行传输接口,通信双方只要采用相同的帧格式和波特率,仅用两根信号线(Rx和Tx)就可以完成通信过程,有独立的发送FIFO和接收FIFO。有可编程的波特率发生器,允许速率高达460.8 kb/s。系统中通过UART传送的数据高速存储于SRAM存储器内供微控制器进行实时快速计算。













评论