式中:控制输出△βREF的系数K难以得到确切值,可以取其估计值K0,将错估部分归为系统扰动。取:

基于式(14)设计自抗扰控制器实现风电系统变桨距调节。以△P为量测输入构造扩张状态观测器,有:
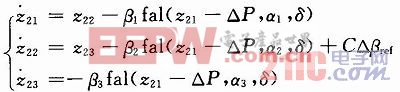
式中:z21,z22为系统状态变量观测值;z23对应系统扰动观测值。

取功率反馈得出状态误差,构成非线性控制律计算控制量:
 本文引用地址:http://www.eepw.com.cn/article/161144.htm
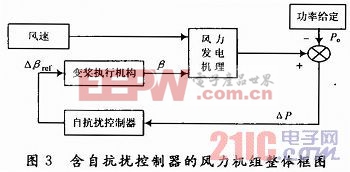
本文引用地址:http://www.eepw.com.cn/article/161144.htm 图3为变桨距自抗扰控制器的风力机组整体框图。其中:△P为自抗扰控制器输入;△βref为控制器输出,实现变桨距控制。
pid控制器相关文章:pid控制器原理















评论