基于直驱型PMSG风力发电系统的变桨自抗扰控制
1.3 变桨距执行机构
目前世界上投入使用的风能转换系统变桨距执行机构主要有两种方案。一种是液压变桨距机构,桨叶通过一套曲柄连杆机构同步驱动或由3个液压缸分别驱动;一种是电动变桨距机构,桨叶由3个电机驱动。风能转换系统的桨距角和变桨距速率的范围都是有限制的,因此变桨距执行系统是带有死区的非线性系统。图1为变桨执行机构的基本原理框图。本文引用地址:http://www.eepw.com.cn/article/161144.htm

当桨距角和变桨距速率在饱和极限范围内时,变桨距执行系统表现为线性特性。执行系统的模型为一阶微分方程:
![]()
式中:β是执行系统输出,即节距角的实际值;βref为参考节距角,是控制器给出的桨距角设定值;Tβ为变桨伺服系统的时问常数。一般而言,Tβ很小,β可以很快跟踪到βref。
1.4 直驱型PMSG风电机组整体框图
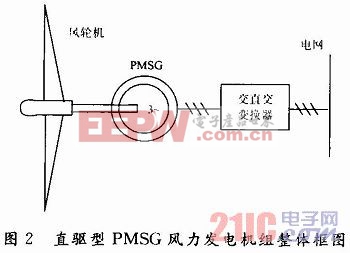
基于PMSG的风力发电机组主要由风轮机和PMSG两部分组成。风轮机捕捉风能,将风能转换成机械能,使风轮机转动,带动PMSG转子旋转,从而产生电能,经交直交变换器输送到电网中。图2为直驱型PMSG风力发电机组整体框图。
2 变桨距控制
2.1 控制策略
直驱风力发电系统变桨距控制总体方案是额定风速以下风力机定桨距运行,由发电机控制系统控制转速,调节风力机叶尖速比,从而实现最佳功率曲线的追踪和最大风能的捕获。在额定风速以上时风力机变桨距运行,由风力机控制系统通过调节桨距角来改变风能系数,从而控制风电机组的转速和功率,防止风电机组超出转速极限和功率极限运行而可能造成的事故。因此,高于额定风速时的变桨距控制成为直驱型风力发电系统的关键。
2.2 自抗扰控制器
取风力发电系统恒功率输出运行时的一个平衡点M,其对应参数为Γut0,Ω0,β0,P0,以M点为参考点将式(2)泰勒展开得:
![]()


pid控制器相关文章:pid控制器原理














评论