基于Cortex-M3内核MCU的BLDCM控制器研究
摘要:用Cortex-M3内核32位高性能MCU设计一款通用性、控制性较好,性价比较高的BLDCM控制器。根据BLDCM的工作原理和MCU的良好性能进行了详细设计。实现了对BLDCM的转速、电流双闭环控制,通过实验测试了控制器的各项性能。该款基于32位MCU的控制器性能良好,结构紧凑,性价比高,具有较高实用价值。结合应用经验发现,API函数支持下Cortex-M3内核的MCU在硬件控制和软件编程方面较以往单片机等具有优势,基于API函数支持的MCU应用将是未来趋势。
关键词:Stellaris;LM3S615;BLDCM;双闭环;实验测试
Luminary Micro的Stellaris(群星)系列MCU以其32位的性能和低至1美元的价格在微控制器领域表现出了卓越的优势,其中的LM3S615便包含ARM公司最新推出的针对微控制器应用的Cortex-M3内核,另含10位两通道ADC,6路带死区PWM,6路CCP,3个模拟比较器、1个低压差线性稳压器、2个完全可编程的16C550-type UART、同步串行接口(SSI)、3个通用Timer,I2C、温度传感器等片内外设,以及32KBFLASH、8KB SR AM、高达34个GPIO管脚。它有丰富灵活的外设驱动库函数及例程支持编程,可方便用于步进电机、无刷直流电机(BLDCM)、交流电机控制。
本文针对内含霍尔位置检测传感器的BLDCM,选用LM3S615设计一款通用性和控制性较好BLDCM控制器,并经过实验对其基本性能进行了多方面测试。
1 BLDCM的工作原理
无刷直流电机由电机本体、转子位置传感器和逆变供电电路3大部分组成。电机本体包括定子(电枢)和转子两部分,定子一般为多相绕组,转子由永磁材料按一定极对数组成。运行时转子在电枢气隙磁场带动下旋转,同时位置检测传感器将不断检测所得转子位置信息反馈给控制器,控制器通过运算送出控制信号驱动逆变电路中的功率开关器件轮流导通,电枢绕组轮流通电,气隙磁场不断跳跃步进,转子就不断旋转。控制器用以驱动开关器件的多为PWM信号,改变PWM的信号占空比可改变电枢的平均端电压,进而可改变电机转速,设计时应注意驱动开关的PWM信号逻辑关系要正确并应避免上、下桥臂直通。
2 基于LM3S615的BLDCM控制器的构成原理
基于LM3S615的BLDCM控制器结构原理见图1。
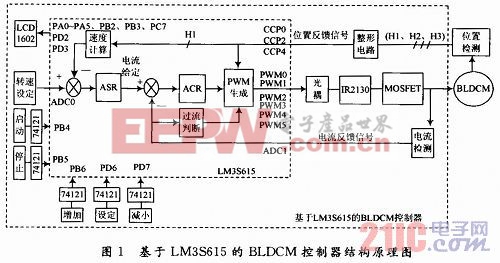
2.1 主要硬件组成及原理
原理图1同时给出了系统硬件组成及主要I/O分配。控制器对应的为三相无刷直流电机,电枢Y型接法,采用三相两通六状态供电方式和H_PWM,L_on单极性逆变桥控制(即绕组通电时下桥臂管一直导通,上桥臂管PWM调制)方式,这也能降低双极性PWM控制带来的较高开关损耗和噪音。
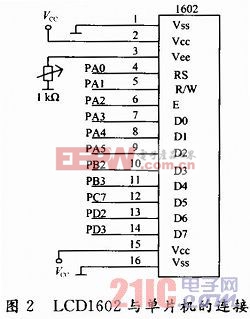
控制器通过ADC0通道(1#引脚)前端电位器设定转速,对应的10位A/D转换器会将转速设定值转换成数字量并保存在特定存储单元中,此后系统启动和运行时所需转速设定值从该单元读出,不需经常读入和A/D转换。LCD为能显示16×2个字符的1602。它能实用来实时显示转速设定值、当前转速值,系统故障代码以及在设定P,I时显示参数,图2为1602与MCU的连接图,图中电位器可用于调节背光;通过启动和停止按键控制电机启停;设定按键四次按下可选择设定两个PI调节器的4个参数(即ASR和ACR的P、I参数),增加和减小按键以0.1步距改变参数,设定;增加、减小3个按键在电机停止时可用,在运行期间无效,控制器的5个按键均通过单稳态触发器74121后再接MCU的GPI0引脚,对这5个GPIO引脚可通过GPIO函数将工作方式设定为中断;内嵌于电机的霍尔传感器能将转子位置转换成脉冲信号并送给MCU,表1给出了3路霍尔信号逻辑组合及正反转对应的功率器件导通顺序。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理









评论