基于步进电机细分驱动的太阳能自动跟踪系统的设计
3 步进电机驱动方法对太阳能自动跟踪精度影响的研究
在太阳能自动跟踪系统中,每一个模块对跟踪精度都有影响,本文重点研究步进电机驱动方法对跟踪精度的影响,必须使其他因素理想化,排除它们对跟踪系统精度的影响,采用仿真进行研究。
以南宁市夏至日高度角跟踪为例,日出时间为当地真太阳时5时14分,日落时间为当地真太阳时18时46分。
3.1 自动跟踪未采用细分驱动
对南宁市夏至日高度角数据进行研究后发现,间隔时间为4.5分钟时,太阳高度角的变化大约为0.9°,所以在不采用细分驱动时太阳能电池板在高度角上的调整至少需要间隔4.5分钟。
间隔4.5分钟,无细分高度角跟踪图如图7所示。图中的阶梯波形曲线为高度角跟踪曲线,另一条曲线为实际的南宁市夏至日高度角曲线。不对光电传感器部分进行仿真。本文引用地址:http://www.eepw.com.cn/article/161096.htm
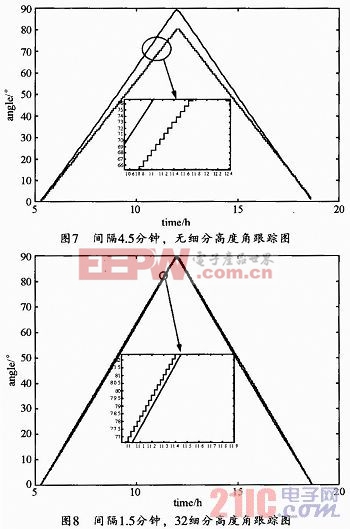
在阶梯波中,电池板转动小角度所需要的时间相对于数分钟的等待时间来说是非常短暂的,所以忽略电池板转动所需要的时间。系统的跟踪过程为:每隔4.5分钟计算出高度角差值,除以半步步距角0.9°,得到所需脉冲数,由于脉冲只能是整数,所以对所得数据进行四舍五入处理,将得到的脉冲数发送使步进电机带动电池板转动。
跟踪的最大误差是9.14°,平均误差是3.96°。通过实验发现,步进电机在没有采用细分驱动时震动和噪声比较大,每一个脉冲的旋转角度误差是比较大的,由于仿真中是假定此时一个脉冲使步进电机旋转0.9°,所以实际的要比理想化的跟踪误差要偏大。
不考虑反馈,出现累积误差,配上传感器电路作为反馈修正,可消除部分累积误差,但是步进电机的最小旋转角度是0.9°,对于诸如1.3°,2.4°这样的离0.9°的整数倍较远的角度偏差改良效果不佳,所以用光电传感器电路进行反馈时对跟踪精度的改良效果也十分有限。
此时电池板的等待间隔时间至少是4.5分钟,在这段时间内电池板的角度是不变的,但是太阳高度角是一直在变化的,所以等待时间越长,则电池板采集太阳能的效率就会越低。
3.2 自动跟踪采用细分驱动
间隔1.5分钟,采用32细分高度角跟踪图如图8所示,其跟踪过程与图7类似。采用32细分驱动,0.0563°/步,间隔时间缩短,跟踪的最大误差是1.25°,平均误差是0.9°。由图8可知,跟踪误差比不采用细分驱动时明显减小,精度提高,细分驱动后步进电机运行稳定,每个步进精度接近于0.0563°,采用传感器电路进行反馈补偿后可进一步提高跟踪精度,此时的补偿效果优于一般驱动。
间隔1.5分钟,64细分高度角跟踪图如图9所示,其跟踪过程与图7类似。跟踪的最大误差是0.4°,平均误差是0.16°。64细分驱动后精度比32细分进一步提高,并且64细分驱动时还可进一步缩短间隔时间。对于一般的实际应用来说,64细分,间隔1.5分钟,再配以光电传感电路进行角度反馈补偿是完全能满足太阳能自动跟系统的精度要求。
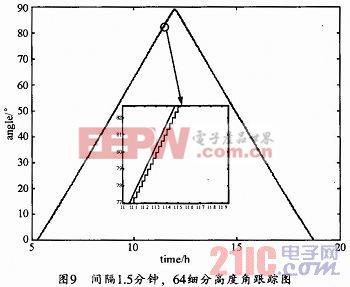
基于缩短等待间隔时间,传感器对小角度补偿时误差减小和步进电机运行稳定三方面来考虑,太阳能自动跟踪系统中步进电机驱动应采用细分驱动,这样可以大幅提高跟踪精度,充分利用太阳能资源。
4 结束语
文中设计以单片机为核心的太阳能自动跟踪系统,系统为双轴跟踪,能自动检测昼夜和判断天气状况。自动跟系统采用预先计算好的太阳位置进行自动跟踪,晴天时光电传感器对可能出现的误差进行修正,减小跟踪误差。深入地分析比较系统中步进电机驱动采用一般驱动与细分驱动对跟踪精度的影响,得出结论,与采用一般驱动方法的系统相比,采用步进电机细分驱动的太阳能自动跟踪系统跟踪精度高,有效地提高太阳能利用率。












评论