四旋翼飞行器无刷直流电机调速系统的设计
4 无刷直流电机调速系统软件设计
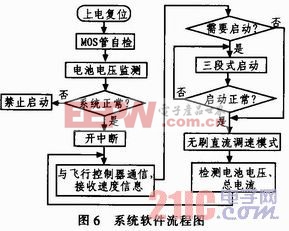
该无刷直流电机调速系统应用于四旋翼飞行器上,电机的转速与飞行器的升力之间没有确定的关系,而且受电机参数、螺旋桨结构与尺寸影响很大,因此该电机调速系统对电机调速的精度要求不高。飞行姿态的控制则是通过机载IMU惯性测量单元与该调速系统结合形成负反馈系统完成的,调速系统控制器通过I2C总线与飞行控制器通信,接收PWM占空比信号值。飞行姿态的调整在本文不做研究,因此该调速电路只要实现开环调速即可满足性能要求。该系统软件流程图如图6所示。
4.1 电机启动程序设计
该直流无刷电机调速系统的驱动采用软件启动方式。直流无刷电机在静止或者低速运行的时候,非导通相反电动势为零或者极低,不利于测量,难以实现电机的自启动。本设计采用三段式启动方法:首先给AB相通较低电压较长时间实现电机转子的预定位,其次根据估测的换相时间换相逐步提高电压缩短通电时间,最后检测反电动势过零点信号是否正常,正常后转入无刷直流电机运行状态。期间检测系统总电流值,若超过20 A则产生中断信号并关断所有MOS管,启动失败,重新启动。
4.2 电机调速控制程序
当电机自启动以后,则进入无刷直流电机无传感器运行状态。选择相应的未导通相,设置模拟比较器相应的输入通道,打开比较器中断,进行反电动势检测,并且记录中断响应时刻,计算相邻两次换向时间差,计算换向延迟30°电角度需要的时间,等待换相。电机速度的调整通过PWM信号的占空比来进行调节。
4.3 电机保护程序设计
为了防止电机堵转、控制信号故障、硬件驱动电路故障引起的电流过大烧毁电机,设计了保护程序。首先系统上电时会检测系统电池电压是否在额定范围内,如果电池电压低于10 V,则关闭所有MOS管,禁止启动飞行。若电池电压正常则进行MOS管短路检测,首先全部关断所有MOS管检测系统漏电流是否在安全范围内,然后依次导通每个MOS管,关闭其他MOS管,检测系统电流,如果远大于系统漏电流则表明有MOS管被击穿,停止启动。如果MOS管自检全部通过则进入正常启动程序。正常工作中监测系统总电流,若电流超过20 A则进入保护状态,产生中断信号并关断所有MOS管。
5 系统测试
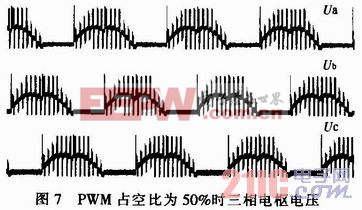
经过调试,此方案下实现的四旋翼飞行器无刷直流电机调速系统能够满足要求。用安捷伦6054示波器观测该电机调速器控制新西达2217无刷直流电机空载运行时的三相绕组相电压波形,图7所示PWM占空比为50%时的波形。经测量系统设置电机为最高转速时系统总电流低于7 A,电机没有发热现象。
6 结束语
针对四旋翼飞行器的要求设计了该款基于ATmega8单片机的无刷直流电机调速系统,采用反电动势过零检测法实现无传感器控制,完成了硬件设计与软件调试,同时设计了电机保护策略,尽可能保证系统的安全。经试验证明,该系统能够正常驱动无刷直流电机,为四旋翼飞行器提供动力来源。

比较器相关文章:比较器工作原理











评论