无电网电压传感器三电平PWM整流器研究
3 简化三电平SVPWM算法
此处对三电平整流器采用新颖的SVPWM简化控制算法,该方法是将三电平空间矢量图分解为6个相互重叠的小六边形(用S=1~6标志),如图2a所示:每个小六边形即代表传统的二电平空间矢量图,再利用两电平算法进行实现,这对三电平而言更加简单方便。本文引用地址:http://www.eepw.com.cn/article/161032.htm
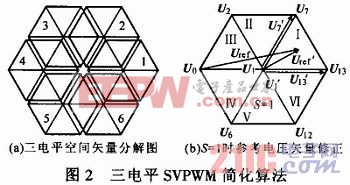
在三电平向两电平平面过渡时,需对参考电压矢量进行修正。图2b为S=1时的参考电压矢量修正示意图。Uref为原参考电压矢量,按照最近三矢量法则,该参考矢量可由电压矢量U1,U13,U7共同合成。各矢量减去小六边形原点U1后,参考矢量和相邻矢量转化到该小六边形三角形区域内,其中![]() 分别为Uref,U1,U13,U7修正后的两电平中电压矢量,以U1为原点,且U1’为零矢量。通过转化后,三电平SVPWM算法即可采用常规的二电平SVPWM算法实现。
分别为Uref,U1,U13,U7修正后的两电平中电压矢量,以U1为原点,且U1’为零矢量。通过转化后,三电平SVPWM算法即可采用常规的二电平SVPWM算法实现。
针对三电平整流器中点电位波动的问题,此处采用基于检测直流侧电容电压改变小矢量作用时间的方法来抑制中点电位波动。即结合整流器运行状态,在获得中点电位偏差的情况下,针对偏差的不同情况,动态改变正、反组小矢量的作用时间即可对中点电位波动进行抑制。
4 虚拟电网磁链位置角的观测
准确观测虚拟电网磁链矢量的位置角θ是三电平PWM整流器虚拟电网磁链定向无电压传感器控制的关键。可根据三电平PWM整流器在α,β坐标系中的电压平衡方程,通过对网侧电压积分即可估计出电网虚拟磁链:
![]()
式中:um为整流器交流侧输出三相电压α,β分量;ψm为电网虚拟磁链的α,β分量。
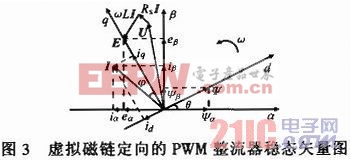
令![]() ,按虚拟磁链定向时,定向角可为θ=tan-1(ψβ/ψα),据此进行坐标变换,得到d轴虚拟磁链定向的同步旋转坐标系统,从而实现无电网电压传感器的矢量控制,其坐标变换关系如图3所示。
,按虚拟磁链定向时,定向角可为θ=tan-1(ψβ/ψα),据此进行坐标变换,得到d轴虚拟磁链定向的同步旋转坐标系统,从而实现无电网电压传感器的矢量控制,其坐标变换关系如图3所示。

pwm相关文章:pwm原理










评论