小型纺织绕线恒张力控制系统的研究和设计
3.2 自适应模糊PID控制器的设计
PID控制是过程控制中应用广泛的一种控制规律,具有结构简单、可靠等优点,对于连续系统的PID控制规律为:
离散系统的PID控制规律为:
常规的PID控制器的参数是固定的数值,而对于参数随着时间不断变化的绕线系统,常规PID控制器的精度不是很高,当参数设置不佳时甚至造成系统不稳定,因此,本系统采用模糊PID控制,可在卷绕过程中,在线跟踪被控过程的动态特性,及时修改参数实现恒张力绕自动化。
模糊PID控制器以3个二维模糊控制器FC1,FC2和FC3的输入误差E,误差变化EC作为输入,控制量△KP,△KI,△KD作为输出,分别完成输入量模拟化、模糊推理运算以及对结果非模糊化过程,不同时刻E和EC对PID参数进行修改,即构成了模糊PID控制器。
3.2.1 输入输出量的模糊化
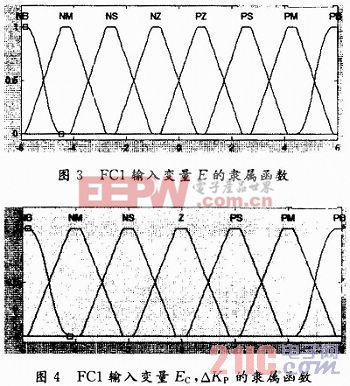
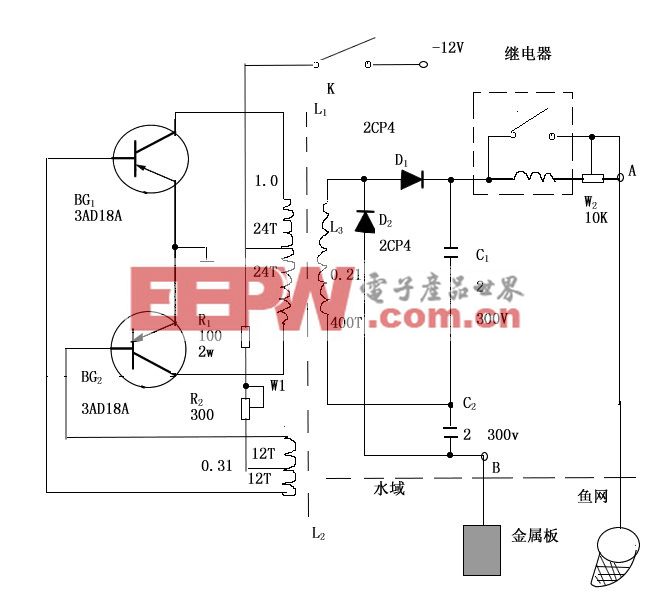
FC1模糊语言变量的设计:设二维模糊推理输入模糊语言变量为E和EC,模糊论域为[-6,+6],将偏差的模糊语言变量E的语言值设定为8个,即{NB,NM,NS,NZ,PZ,PS,PM,PB}。将偏差变化率的模糊语言变量EC的语言值设定为7个,即{NB,NM,NS,Z,PS,PM,PB}。将输出模糊语言变量△KP的语言值设定为7个,即{NB,NM,NS,Z,PS,PM,PB}。输入输出的隶属函数分布如图3,图4所示。本文引用地址:http://www.eepw.com.cn/article/160871.htm
FC2模糊语言变量的设计:将输入变量E,EC和输出变量△KI的语言值都设定为7个,即{NB,NM,NS,Z,PS,PM,PB}。
FC3模糊语言变量的设计:将输入变量E的语言值都设定为7个,即{NB,NM,NS,Z,PS,PM,PB}。将输入变量EC的语言值都设定为6个,即{NB,NM,NS,PS,PM,PB}。将输出变量△KD的语言值都设定为7个,即{NB,NM,NS,Z,PS,PM,PB}。
3.2.2 模糊控制规则
为了使模糊规则符合工程上根据系统超调量修正控制器输出的语言习惯,在这里取实际偏差e为反馈值减给定值,即:e(t)=y(t)-r(t)。其中r(t)为给定输入量;y(t)单位负反馈系统的输出量。根据偏差、偏差变化率的不同状态及PID控制基本原理可设计参数自调节模糊PID控制器FC1的模糊控制规则表如表1所示。FC2和FC3的模糊控制规则表以此类推。

















评论