三维无线移动传感器网络k-覆盖研究
(5)根据弧(iout,jin)上的流将传感器移动到小立方体j。
其中,push-relabel(v)算法步骤为:
含有O(2L)个节点,每个节点iout至多有O(D3)=O(logL)条出度弧,而每个iin只有一条出度弧(iin,iout),因此图
4 仿真与分析
为了检验理论的正确性,对移动传感器网络k-覆盖仿真。将网络划分为边长
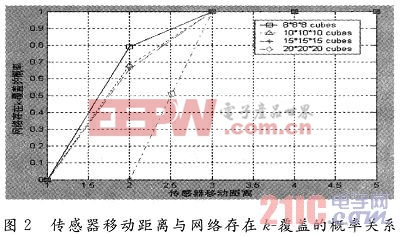
图2表示对固定的k值(k=3),随着移动距离的变化,不同规模网络存在k覆盖的概率(其中距离被dh规范化)。
由图2可知,网络从8×8×8增长到20×20×20的小立方体时,网络达到k-覆盖传感器需移动的最大距离都为3dh。这说明,随着网络规模的增大,传感器移动的最大距离增长微小。










评论