某探测器测试与信号处理系统的PCM信息采集
3.1 帧格式
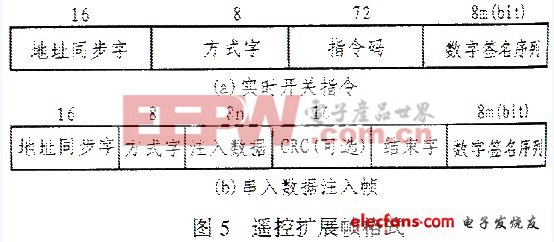
在中国的某些规定中,为了保护PCM遥控数据,在PCM遥测中使用两种遥控扩展帧,即实时开关指令和串行数据注入帧。这两种遥控帧的后面都可以附加一个长度为8m(m=1,2,3……)bit的序列以用于数据的保护。具体如图5所示。
本系统中?信号采样后可按照基准信号的周期进行分帧处理,程序每次处理的是上一帧的采样数据(数据处理延时1帧),然后再根据计算结果合成跟踪信号;在处理数据的同时,可采用中断输出的上一帧来计算跟踪信号(跟踪信号输出延时2帧)。
假设基准信号如图6所示,那么,采用过零检测可得到正、负过零时刻,但有时基准信号的过零点不唯一,故可将过零检测改为过某一固定电平检测。

在正过零时刻,由过零检测电路可产生硬件中断IRQ0,中断响应程序首先记录当前缓冲区的长度L,然后进行缓冲区切换。假设将缓冲区切换到Buffer(I)(I=1,2,3,4),此后的采样数据采用DMA方式放入Buffer(I)。那么,4个缓冲区将按照1->2->3->4->1的方式循环。
在负过零时刻,将由过零检测电路产生硬件中断IRQ1,然后计算基准信号正峰值位置N,(为了清楚起见,图6中不同周期的N分别用N1和N2表示),定义M为IRQ1中断时当前缓冲区的长度,则N1=M/2。相邻两个峰值之间的数据为一帧数据,图6中,N1和N2之间的数据为一帧数据。
由于基准信号的频率不稳定,因此不能采用固定长度的缓冲区。为了便于寻址,采集数据缓冲区的长度定为1024。由于一帧完整的数据将跨越两个缓冲区,同时为了处理目标跨越两帧数据的情况,可将采样缓冲区数定为4个,其中一个作为当前采集数据的DMA传输目的,另外三个作为两帧完整数据的缓存。
因为共有22路信号需要采样,设置的缓冲区应有22组,故此,定义0~15为中波信号,16~20为短波信号,21为基准信号,22为解锁信号。
3.2 同步问题
除帧格式外,时分制遥测信号的同步和时隙关系也很严格?即所谓的同步问题。具体有帧同步、字同步、位同步等多种形式。在数字遥测(PCM)系统中,信道上传输的是二进制编码序列,插入帧同步信号要易于识别和提取,并应与正常信号编码有显著差别且能减少假同步和漏同步概率。目前常用的帧同步码组有巴克码组、伪随机码组等。实际上更基本的同步是时钟同步(也称为路同步或位同步),也就是要求收发两端数据流的时钟严格同步。本系统使用CPLD对接收到的基准信号进行处理以作为帧同步的标志。
4 结束语
通过时分制,并用DSP DMA技术实现的PCM高速数据采集系统具有很高的信噪比,完全可以达到设计要求。实际上,本实现方案也可推广到多路的采集系统,但设计时应考虑性价比及总线速度问题。












评论