传感器与智能车的路径识别方式
具体应用
我们采取了基于图像传感器的路径识别方案,其参赛的智能车的整体实物照片如图1所示。邀请赛指定唯一微处理器为Freescale HCS12DG128B16位MCU,128K字节的Flash EEPROM,8K字节的RAM,2K字节的EEPROM,2个异步串行通信接口(SCI),2个串行外围接口(SPI),1个8通道的输入捕捉/输出比较(IC/OC)增强型捕捉定时器,2个8通道、10位转换精度的模数转换器(ADC),1个8通道的脉冲调制器(PWM),丰富的I/O资源,内部集成PLL锁相环,可以提高系统时钟工作频率。然而,S12单片机的上限内部总线频率25MHz。在此限制条件下,将微处理器的总线时钟设定为24MHz。
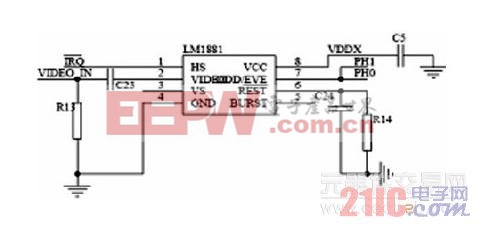
图2 LM1881视频同步分离电路
根据智能车赛道引导线与其背景的巨大反差的特点,这里只需要选择具有全电视信号输出的黑白图像传感器即可。由于所选的黑白图像传感器为PAL制,故行频为64ms,场频20ms,行同步为12ms(行消隐脉冲4.7mS),场同步脉冲宽度为25个行周期(2.048 ms),去掉行同步时间,则每行的有效信息时间是52ms。通过将图像传感器输出的视频信号接至视频同步分离芯片LM1881的视频输入端,就可以得到行同步、场同步、奇/偶场同步信号等,这里只使用行同步、奇/偶场同步信号作为单片机进行视频AD采集的控制信号。使用LM1881提取视频信号中的行、场同步信号的电路原理如图2所示。
处理器MC9S12DG128进行AD采样与转换的时间要求,这里使用24MHz的总线速度,这样每采集一个点的时间大约是2ms,每行的扫描时间是64ms,去掉行消隐与行同步时间12ms,每行有效信息时间为52ms。从数据可靠性与稳定性的角度考虑,我们选择每行采集24个点,每场采集200行,但在实际应用中,每场采取每间隔10行采集一行数据的策略,如此操作就能够满足控制系统的精度要求。图像传感器每场的数据变换成一个20行、24列的一个二维数组。由于微处理器HCS12DG128B的AD默认参考电压为5V左右,而视频信号的白电平为1.2V左右、黑电平0.5V左右,为了体现白黑的巨大差异,这里将A/D采集的参考电压调整为1.5V,从而使得AD采集的正常结果通常是在85~204之间。
结语
本文从传感器与路径识别的关系出发,讨论了红外传感器与CCD/CMOS图像传感器识别方案的优缺点,并优选出CCD/CMOS图像传感器用于智能车路径识别与传感。通过将基于面阵CCD/CMOS图像传感器的路径识别方案应用于第一届“飞思卡尔”杯全国大学生智能车竞赛,并从众多使用红外传感器的参赛队伍中脱颖而出,证明了该方案较红外传感器在路径识别中更具潜在优势。












评论