基于MMA7361角度传感器的帆板控制系统设计
所以,可以得到角度值为:
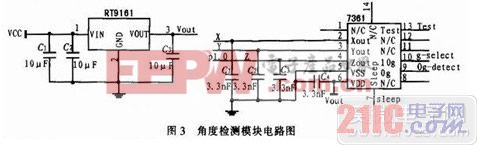
角度检测电路图如图3所示。经角度检测模块输出角度模拟量,经单片机AD转换并经上式计算后就可以得到所测角度值。
1.3 风扇控制模块
PWM(脉宽调制)是一种对模拟信号电平进行数字编码的方法,利用微处理器的数字输出对模拟电路进行控制的一非常有效的技术。相比电压调速的方法,PWM调速具有精度高,易于控制等优点,同时选用的微控制器集成了PCA模块,可直接输出PWM,方便使用。
本系统利用直流电动机驱动风扇转动,电机驱动芯片MC33886是单片集成的H桥元件,适用于驱动小功率直流电机。本电路选择了MC33886的全桥工作方式,采用单片工作时,驱动电路的温度会非常高,有时温度会超过MC33886自我保护的最高温度导致驱动停止工作。
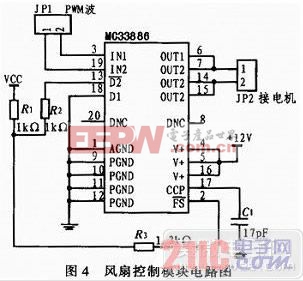
为了解决这一问题,将两片完全相同的MC33886并联,发现温度得到了有效控制,电路的驱动能力也得到了进一步的提高。电路如图4所示。

为了精确控制风扇转速,达到控制帆板角度的目的,本系统由单片机通过角度检测模块得到帆板的实际转角,与预置转角比较,经PI控制器,输出可调的PWM信号,再驱动直流电机旋转,从而形成风速闭环控制系统,即负反馈控制。电机调速模块框图如图5所示。
倾角传感器相关文章:倾角传感器原理










评论