基于dsp的交流调速系统硬件接口电路设计方案
3.4采样电阻的计算
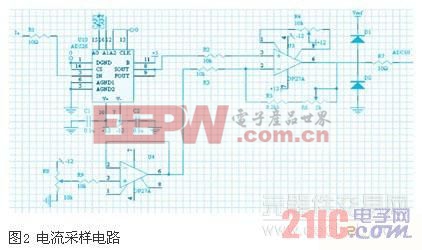
由电流传感器的变比2000:1,及原边电流值大小:200a,ad526输出电压为1.65v,可以求出采样电阻r9《16.5ω,故可取r9=10ω。其中,a相电流的采样电路如图2所示,b相与其相同。
起动的快速性是电动机的基本要求。以目前无位置传感器控制技术发展的情况来看,由于低速特别是起动瞬间反电动势非常低,控制精度和性能并不理想。因此有必要保留位置速度传感器。
4.1编码器的选择
与旋转变压器相比,光电编码器信号处理简单、噪声容限大、易于实现高分辨率。特别是在选用tms320f2812作为控制器的情况下,光电编码器可以通过dsp的qep接口十分方便地实现与控制器的连接。
本设计选用了sumtak株式会社产的lhe-055-2000型带u、v、w信号增量式光电编码器。它输出12路信号:a、b、z、u、v、w以及他们的补信号a’、b’、z’、u’、v’、w’。其中a、b、a’、b’为占空比为50%的方波,2000p/r。u、v、w、u’、v’、w’以转子每360°电角度为一个循环周期。u、v、w(或u’、v’、w’)相差120°,按照u、v、w(或u’、v’、w’)不同组合,可以把一对转子磁极分为6个等距区间。所以在电机起动时,可以先根据u、v、w信号按照无刷直流电动机控制,使电机运行起来,待检测到z信号,按照事先确定好的转子磁极位置确定定子磁链初值,然后转入直接转矩控制。通常把z信号定位于a相绕组反电动势的过零点,此时,转子磁极轴线正好与a相绕组轴线重合。
其中a、b信号分别通过qep1、qep2接到lf2407a上;而z信号通过cap3接到lf2407a上;u、v、w是以60°电角度为周期的数字信号,分别通过qep1、qep2、qep3接到lf2407a上。
4.2 26c32的使用
由于光电编码器内部集成了26c31芯片,所以由它引出了a、b、z、u、v、w以及他们的补信号a’、b’、z’、u’、v’、w’以及地线和电源线,但是这些线不能直接接到dsp上,这里就需要用26c32来接接收由26c31引出的所有线路。
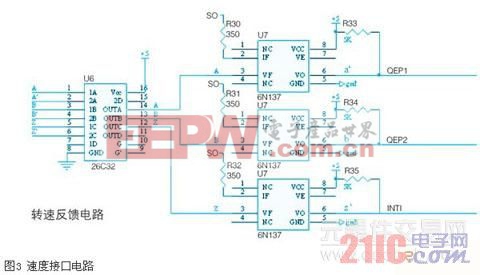
由于26c32可以同时接受四路信号,所以,a、b、z、a’、b’、z’信号可以同时与26c32的ina1、ina2、inb1、inb2、inc1、inc2端相连,输出端outa、outb、outc端分别接到光耦6n137芯片上输出再与tms320f2812的qep1、qep2、int1相连,以完成转速环节的接口电路。
本来光电脉冲编码器的a、b输出可以直接接到tms320f2812的qep1、qep2上,但为保护起见,还得加上高速光电隔离。图3中是a路信号的接口电路,b、z路接口电路与此相同。它主要由ti公司的光耦6n137组成。这里用快速光耦的原因是:码盘输出的信号的频率最高接近60khz,而普通光耦的开通和关断延时就有几个微秒,无法满足要求。在tms320f2812中将捕获单元配置成正交编码脉冲模式,在这种模式下,两个16位通用定时器t1和t2可工作于qep模式的16位或32位双向计数器。qep电路直接处理光电编码器输出的两路相位相差90°的两路脉冲,只要将这两路脉冲分别接到qep1、qep2即可。qep模式对两路脉冲的前后沿均进行计数,无需外部的倍频电路。而且它能根据两路脉冲的先后次序判别电机的转向,省去了外部辩向电路,增加了系统的可靠性。在信号隔离功能之外,光耦还起到滤除脉冲尖峰和毛刺,增强抗干扰能力。











评论