利用传感器检测智能车加速度及速度全面解析方案
2.4 车速检测模块
系统使用红外传感器检测直流电机的转速。在后轮减速齿轮上粘贴一个均匀分布有黑白条纹的编码盘。红外接收管接收与未接收红外光所表现的特性是阻抗变化,所以只需用一个电阻电压变换电路和比较电路便可将其模拟信号转换为数字信号,供单片机采集。
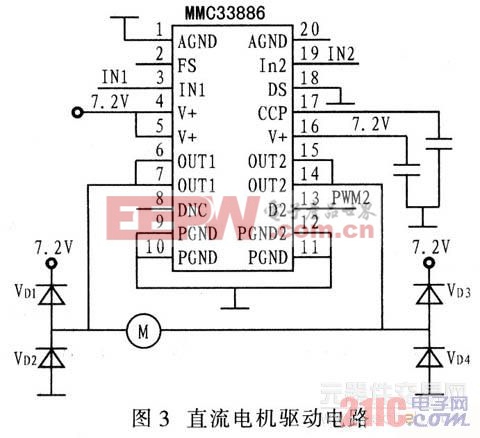
2.5 直流电机驱动模块
系统采用RS380-ST型直流电机,其驱动电路采用集成电机驱动器MC333886。此器件是单片集成的H桥元件,有单桥和双桥两种控制方式,其可控电压为5~40 V,最大PWM频率达10 kHz,内置短路保护电路和过热保护电路,最大能承受的5 A的工作电流。其中D1、D2是MC33886的使能端,INl、IN2为输入端,0UTl、0UT2为其输出端。图3是将MC33886的D2端接到单片机的PWM输出端口,通过MC33886的两个输出端口实现电机的转速控制、方向控制及制动等。采用输出端并联并连接到电机一端,以及增加散热片的方法使智能车在相同电压和占空比时,其速度更快,同时还降低H桥上的压降,减少MC33886发热,防止器件由于温度过高被烧毁。
智能车在高速行驶中如果突然转向,会出现侧滑现象。该系统设计采用ADXL202加速度传感器判断移动智能小车在行驶中是否出现侧滑现象。ADXL202是美国ADI公司推出的低成本双轴加速度传感器,其外围电路简单.采用5 V供电,将加速度传感器的输出端9引脚和10引脚直接接到单片机的AN00,AN01引脚,通过计算输出信号的占空比可
精确检测轴向和横向加速度。
2.7 转向控制模块
智能车使用韩国futaba公司的S3010舵机完成转向控制。舵机控制信号由单片机的PWM模块PWM0和PWMl联合产生一个16位的PWM信号。由于舵机的转角与脉冲宽度存在线性关系,改变PWM占空比可改变输出脉冲的宽度。从而控制舵机转向。将驱动舵机脉冲波型的周期从原来的20ms减小到10 ms,增加舵机控制信号的更新频率,减少舵机控制环节中的延时,提高整个车模转向控制速度。











评论