一种差速驱动小车曲线行走方法
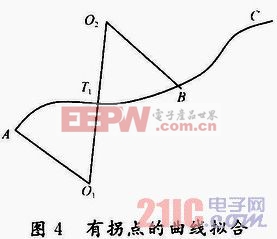
(2)所需拟合的曲线段内有拐点
根据式(6)计算出的理论曲线在相邻两节点处的曲率半径异号,则表明理论曲线在这两点处的曲率方向相反,此时曲线出现拐点,如图4所示。本文引用地址:http://www.eepw.com.cn/article/160260.htm
这种情况只需要将第③个要求改为如下关系式:
![]()
就可以和第一种情况一样,通过计算得到拟合圆弧的圆心坐标。
4 实验及结果分析
在实验中,设给定曲线为y=100(x/500+sin(x/500)),x,y的单位为mm,这里设定△x=100 cm,小车从原点处开始运动,通过多次实验,对小车运动到固定的几个点进行测量,对这些点的坐标取平均,近似绘制出实验结果,如图5所示。
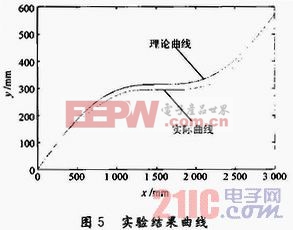
图5中,上方的曲线为理论曲线,下方的曲线为实际行走曲线。可以看出,在小车行进过程中,实际轨迹与理论曲线的偏差不超过30 mm。在实际使用中,基本可以满足给定的30 mm以内的误差要求。
通过对不同给定曲线的实验,发现在曲线的曲率半径小于10 m,并且曲线的变化速率不剧烈的情况下,运动的精度都能得到较好的保证。
由于车轮的转动频率是由单片机产生的,V1和V2是不能连续变化的,所以当曲线的曲率半径越大时,V1和V2的调节范围越小,因而误差会变得很大。这种误差可以通过提高单片机晶振的频率来减小,但不能消除。在实际情况下,可以根据所需要的最大拟合圆弧半径和精度来选择满足要求的晶振。
5 结语
本文根据电磁屏蔽室自动测试装置移动平台的需求,设计了一种差速驱动小车,并介绍了小车的驱动结构、运动学模型、曲线行走算法等,最后对曲线运动进行了实验验证。小车的控制系统为开环控制方式,不能自动修正路径偏差。但由于控制系统结构简单,小车结构容易实现,在一些对电磁干扰要求较高的场合以及由直线、圆弧及不复杂曲线构成的固定路径的机器人领域有着一定的应用前景。













评论