观测器方法在三相逆变器故障诊断中的应用介绍
本文引用地址:http://www.eepw.com.cn/article/160067.htm
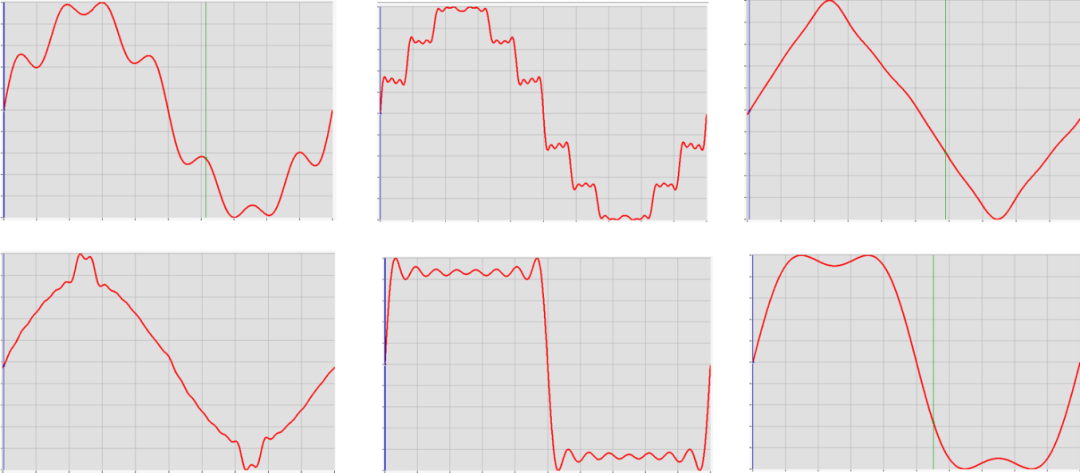
(a)系统运行时未出故障相电流的观测误差(b)Q1、Q3或Q5出现基极开路故障时对应相电流观测误差
(c)Q4、Q6或Q2出现基极开路故障时对应相电流观测误差(d)Q1、Q3或Q5出现基极开路故障时对应相电流观测误差(精度放大)
定理1对于系统Σ,如果是由一组方程式(6)来描述的故障向量,则Σ是单故障可隔离的。
证明:对一组方程式(6)所描述的向量,显然对于任意ik,jk,i≠j,(k=6),由于fi(t)≠fj(t),因此各自引起的系统响应有Yi(t)≠Yj(t),所以根据定义1可知Σ是单故障可隔离的。
33故障观测器的设计
对于故障系统Σ,我们采用如下形式的标准Luenberger观测器。![]()
![]()
![]() =A+Bu+D(y-)
=A+Bu+D(y-)![]()
![]() =A+Bu+D(Cx-C)
=A+Bu+D(Cx-C)![]()
![]() 则可以得到:ex(t)=(A-DC)ex+fi(t),ey=Cex,其中ex=x-,ey=y-。我们设计的目标是选择合适的矩阵D使得A-DC为稳定矩阵。设D=[D1D2}T,D1,D2∈R3×3则:
则可以得到:ex(t)=(A-DC)ex+fi(t),ey=Cex,其中ex=x-,ey=y-。我们设计的目标是选择合适的矩阵D使得A-DC为稳定矩阵。设D=[D1D2}T,D1,D2∈R3×3则: A-DC=(8)
A-DC=(8)
从式(8)可以看出,如果我们取D1=I3,D2=dI3(d>0),则观测器是收敛的。从而得到误差方程的解为:![]() ex(t)=e(A-DC)ex(0)+e(A-DC)(t-τ)fi(τ)dτ
ex(t)=e(A-DC)ex(0)+e(A-DC)(t-τ)fi(τ)dτ![]() →e(A-DC)(t-τ)fi(τ)dτ(9)
→e(A-DC)(t-τ)fi(τ)dτ(9)![]() ey(t)=Ce(A-DC)ex(0)+Ce(A-DC)(t-τ)fi(τ)dτ
ey(t)=Ce(A-DC)ex(0)+Ce(A-DC)(t-τ)fi(τ)dτ![]() →Ce(A-DC)(t-τ)fi(τ)dτ(10)
→Ce(A-DC)(t-τ)fi(τ)dτ(10)
所以,如果fi(t)=0,ex(t)→0,ey(t)→0;如果fi(t)≠0,则根据定理1,我们可以从输出的观测误差中检测并分离出故障,明确定位出发生基极开路故障的GTR。
4仿真结果
从下面的仿真结果可以看出,系统在无故障情况下,各相电流观测误差均能够快速收敛到0。即使某一相发生F5型故障,其他无故障相电流观测误差仍然不受影响地收敛到0〔图3(a)〕。图3(b)、图3(c)和图3(d)中在1s时刻发生故障,从中可见,当某一相的GTR出现基极开路故障时,其对应相电流观测误差将迅速发生突变,且突变方向表示了上臂GTR故障和下臂GTR故障之间的不同,因此可以用来准确确定故障源。
5结语
尽管控制系统的故障诊断技术在各方面取得了进展,但其在电力电子系统方面的应用研究却不多见,这与电力电子技术被广泛应用的现状是不协调的。由于电力电子器件的数学模型在研究运动系统控制的同时已经得到了比较深入的研究,因此将已有的、理论和实践上都比较成熟的故障诊断技术,应用到电力电子方面的故障诊断中,必定会取得令人满意的结果,也必定是件很有意义的工作。由于电力电子系统故障必然会导致系统状态与输出量中各基波量和谐波量的变化,因此,如果采用基于信息处理的故障诊断方法来进行这方面的故障诊断,这也是现在尚未开展但又可行而有意义的研究方向。本文采用的基于观测器的故障诊断方法,从理论分析和仿真结果来看,都不失为一种行之有效且实现简单的方法,可以直接结合到控制系统中进行应用。









评论