内模PID控制器在无刷直流电机调速系统中的应用
由式(5)可知内模控制器为:

由式(16)可知,在被控对象过程模型已知的条件下,T1、T2和K是已知的,故在控制器的设计中,需要调试的参数只有一个λ。
5 结果仿真与分析
根据相关资料,无刷直流电机的各项相关参数如下:UN=220V,IN=136A,nN=1460r/min,电枢电阻Ra=0.2Ω,允许过载倍数λ=1.5;变流装置Ts=0.001 67 s,放大系数Ks=40;枢回路总电阻R=0.5Ω;电枢回路总电感L=15 mH;机电时间常数Tm=0.18 s;电枢回路电磁时间Tt=0.03 s;电机轴上的总飞轮惯量GD2=22.5 N·m2;电流反馈系数β=0.05 V/A;转速反馈系数α=0.007 Vmin/r。
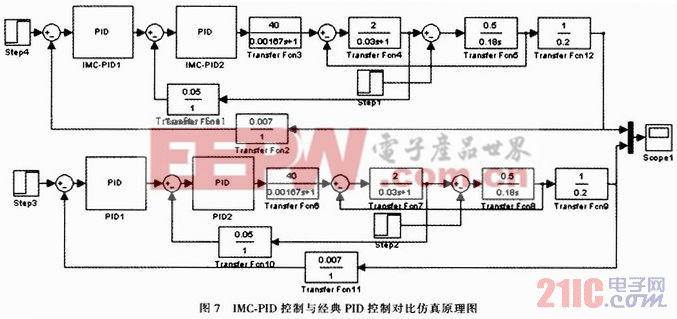
运用MATIAB中的Simulink工具箱对系统进行仿真研究,其仿真原理如图7所示。
其对比仿真结果如图8所示。
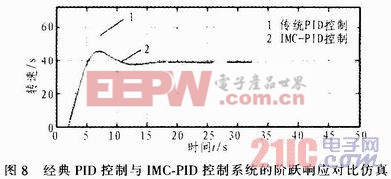
由仿真结果可以看出,基于内部模型来设计PID控制器参数的控制方式,相对于传统PID控制器来说,更有调节时间短,响应速度快,超调量小,能使系统尽早地达到稳定等优点,能有效提高被控对象的动态、静态性能。同时在参数调节的过程中,基于内部模型的PID控制器参数只有一个,故而调节更为方便,更有利于应用工程实践中。
6 结论
本设计通过仿真分析比较传统PID控制器与基于内模原理的PID控制器在双闭环无刷直流电机转速控制系统中的控制效果,结果表明基于内模原理的PID控制器在无刷直流电机转速控制系统中能达到传统PID控制器的控制要求,同时,基于内部模型的PID控制器在参数调节上更方便,故而此种控制器比较合适应用于双闭环无刷直流电机的转速控制中。

pid控制器相关文章:pid控制器原理











评论