基于双环控制和重复控制的逆变器控制方案研究
icom(k)=KV〔vref(k)-vc(k)〕+id(k)(6)本文引用地址:http://www.eepw.com.cn/article/159966.htm
式中:vref是正弦参考电压;
icom是电压环算出的电流环指令。
图5(b)是补偿负载电流后且忽略电流环动态过程的简化电压环。同样用无差拍原理确定电压环控制器KV。
用零阶保持器法得到离散的控制对象的传递函数为
GV(z)=Z![]() =
=![]() (7)
(7)
其闭环特征方程是
z-![]() =0(8)
=0(8)
将闭环特征根全部配置在原点,得到
KV=C/T(9)
图6是逆变器对数频率特性曲线,虚线为开环频率特性,实线为经过解耦和补偿后双环无差拍系统的闭环频率特性。很明显,逆变器开环谐振峰被削掉了,原来的欠阻尼性质得到了极大的改善,对于稳定性也有利。闭环带宽增加到2kHz,动态响应速度大大加快。
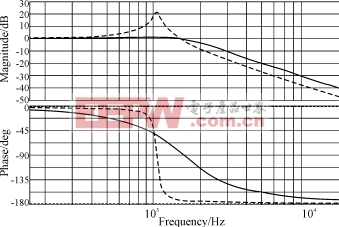
图6 对数频率特性曲线(虚线:开环;实线:加双环之后)
瞬时电压环对负载电流进行的补偿在一定程度上抑制了由负载引起的波形畸变。但这种补偿只有在电流环的传递函数为1时才能进行完全,否则,给出的补偿信号总存在相位误差。在设计瞬时电压环时只能近似认为电流环传递函数为1,所以,双环系统虽然能达到很快的动态响应速度,但对抑制整流性负载造成的波形畸变效果有限。为了得到更好的稳态波形,势必采用一种能完全补偿扰动的方案,重复控制就是一种成熟有效的手段。本控制方案在电流电压双环的基础上加入一个重复控制环构成复合控制系统。它位于双环的外层,对稳态波形质量进行控制。
2.2 重复控制器设计
如图7所示,PB(z)是设计好的双环系统,负载及其他因素的影响由扰动量d等效。重复控制器的输出叠加于原有的参考输入之上,以产生矫正作用。重复控制器由周期延迟正反馈环节和补偿器KrzkS(z)组成,N是数字控制器每周期的采样次数,Q(z)用以增强系统的稳定性,常取为0.95。周期延迟正反馈环节对逆变器输出误差进行逐基波周期的累加。补偿器的作用是与逆变器对象实现中、低频对消和高频衰减,这样重复内模(即周期延迟正反馈环节)给出的补偿信号才能幅值和相位均正确地与扰动对消,实现稳态波形的无差。PB(z)是加双环之后的等效逆变器对象,从图6可以看出其谐振峰已经被抵消,因此,补偿器的设计大大简化,只须完成高频衰减和相位补偿的功能。Kr是重复控制器增益,S(z)取为一个截止频率与PB(z)近似的二阶滤波器以实现高频衰减,超前环节Zk实现S(z)PB(z)的相位补偿。由于超前环节的存在,所以引入周期延迟环节z-N,否则,重复控制器无法物理实现。
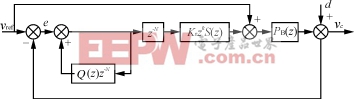
图7 带重复控制环的复合系统
因为z-N的引入,重复控制器对扰动的矫正要延迟一个基波周期,但是位于内层的双环无差拍控制器则对扰动有着极快的抑制作用。相反地,双环无差拍控制器对扰动的补偿是有限的,而重复控制的引入可将扰动近乎完全补偿,稳态效果极佳。此外,如图6所示,双环控制使逆变器对象的截止频率加大到2kHz,重复控制器的补偿范围也得以扩大。
3 系统设计与实验
本控制方案在一台基于DSPTMS320F240控制系统的IGBT单相半桥逆变器实验装置上得到了验证。实验装置参数为:滤波电感1.14mH;滤波电容20μF;输入直流电压250V;输出交流电压幅值100V。
开关和采样频率均为10kHz,根据上述分析,计算出KV=0.2,KC=11.1。
加双环后的等效逆变器控制对象是
PB(z)=![]() (10)
(10)
据此选择二阶滤波器
S(z)=![]() (11)
(11)
超前环节是z4,取Kr=1,N=200。
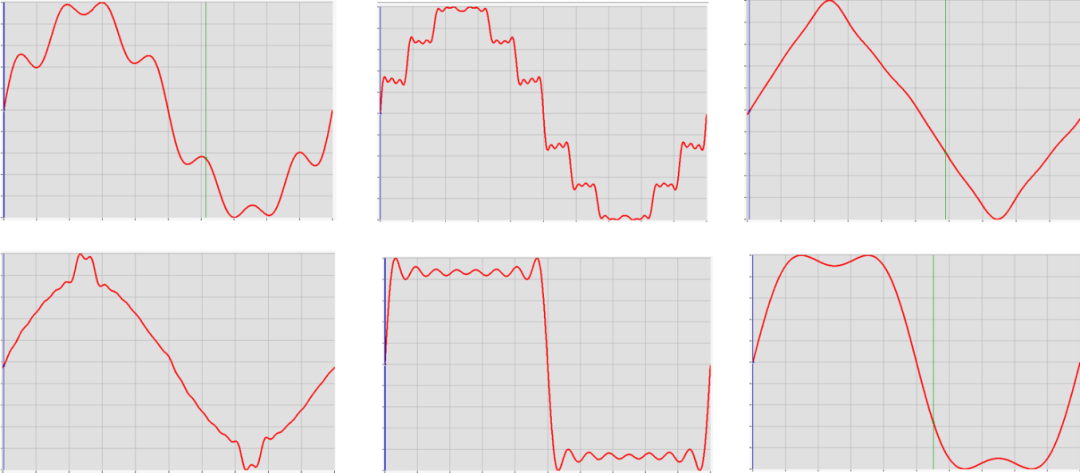
图8是双环系统带非线性负载时的波形,THD达4.84%,可见瞬时电压环对电流扰动的补偿效果有限。图9是复合控制系统负载突加过程,在突加阻性负载时,经0.5ms波形便恢复正常,在最恶劣的情况下即突加整流负载时,经5个基波周期波形也能完全恢复正常。图10是复合控制系统稳态工作波形,带阻性负载时的THD是1.71%,带整流性负载时的THD是1.54%。
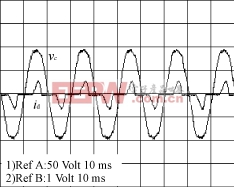
电 压 : 50 V/格 电 流 : 10 A/格














评论