单极性SPWM的两种控制方法与过零点输出特性分析比较
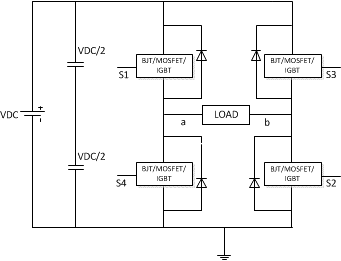
1)t0~t1时刻 由图4可以看到,在t0~t1时刻,由于给定的低频臂信号是1,对应图3可以知道主电路低频臂下管导通,图4中SPWM对应的是高频臂上管的驱动信号,上管的SPWM驱动信号逐渐变小。由图1可以知道在t0~t1时刻,输出正弦波信号由正逐渐变为0。本文引用地址:http://www.eepw.com.cn/article/159960.htm
2)t1时刻 在t1时刻,低频臂信号由1变为0,所以,低频臂由下管导通变为上管导通,由图3可以分析出,在低频臂切换的同时,产生SPWM的比较器也进行了切换,所以,由E1误差信号产生的SPWM(高频臂上管)在t1时刻马上变为接近100%的SPWM,然后逐渐变小。高频臂下管的驱动互补于高频臂上管的驱动,所以高频臂下管的驱动由0逐渐变大。由图1可以得知,输出正弦波信号由0逐渐变负。
3)t1~t2时刻 实际的输出误差信号E2会与E1相差一个相位,所以,产生的SPWM2与SPWM1是不同的。由图4可以看出:t1时刻以后,SPWM2马上就为0,由于高频臂下管信号互补于SPWM2,对应于主电路,在t1时刻高频臂下管马上以一个比较大的占空比导通,然后占空比慢慢变小(图中SPWM2逐渐变大),高频臂下管信号并不是由0逐渐变大,SPWM的突变必然会引起输出正弦波信号在过零点的振荡。可供选择的解决方案如下:
(1)在低频臂切换的同时,把输出误差信号人为地放电,使其为0,这样就可以减弱在过零点时刻所引起的振荡;
(2)人为地把低频臂信号超前或滞后一定相位,但是,这一方案由于低频臂信号的相位受负载轻重的影响,实际上难以做到准确。
1.2.2 双边SPWM控制
双边SPWM的控制电路如图5所示。由于低频臂的切换作用,高频臂PWM输出性质随之改变。例如,过零前Sg1的窄脉冲对应为输出低电压,低频臂切换后突然成为高电压。然而与单边SPWM控制所不同的是,双边SPWM中的反相动作是与低频臂同时进行的。由于控制器中的输出没有突变,低频臂的切换也不会造成输出的突变。

图 5 双 边 SPWM控 制 电 路
图6所示的是双边SPWM控制方法在过零点附近的SPWM示意图。图6中E1为理论上跟基准(电压波形)同相位的误差信号,由于在电压环和电流环两个环节中存在积分环节,实际的误差信号E2会与基准信号相差一个相位。图中SPWM1是理论上的高频臂上管的驱动信号,SPWM2则是实际的高频臂上管的驱动信号。
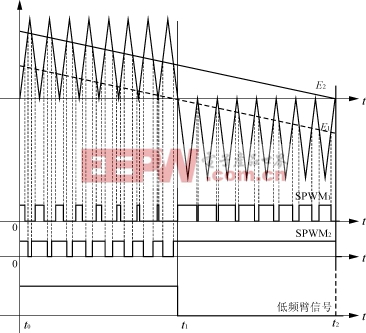
图6 双边SPWM控制在过零点附近的SPWM示意图
1)t0~t1时刻 由图6可以看到,在t0~t1时刻,由于给定的低频臂信号是1,对应图5可以知道主电路低频臂下管导通,图6中SPWM对应的高频臂上管的驱动信号,由图1可以知道在t0~t1时刻,输出正弦波信号由正逐渐变为0。
2)t1时刻 在t1时刻,低频臂信号由1变为0,所以低频臂由下管导通变为上管导通,由图5可以分析出,在低频臂切换的同时,产生SPWM的比较器也进行了切换,所以,由E1误差信号产生的SPWM(高频臂上管)在t1时刻马上变为100%的SPWM,然后逐渐变小。高频臂下管的驱动互补于高频臂上管的驱动,所以,高频臂下管的驱动由0逐渐变大。由图1可以得知,输出正弦波信号由0逐渐变负。
3)t1~t2时刻 实际的输出误差信号E2会与E1相差一个相位,所以,产生的SPWM2与SPWM1是不同的,由图6可以看出,在t1到t2时刻,高频臂上管驱动一直都是高电平,由于高频臂下管互补于上管驱动,所以,在t1到t2时刻,高频臂下管是不导通的,此后有一软开通过程。由图6中SPWM1与SPWM2的比较可以看出,误差信号滞后于基准信号有利于抑制正弦波输出信号在过零点的振荡。
2 计算机仿真与实验结果
应用电子电路计算机辅助分析于设计软件Matlab,分别对上述两种控制方法进行了仿真。
仿真条件:输出220V,f=25Hz
2.1 单边SPWM控制的仿真波形
单边SPWM控制的仿真波形如图7所示。从图7可以明显地看到,正弦波在过零点的时候有明显的振荡,跟理论分析完全吻合。

图7 单边SPWM控制方法仿真波形
脉宽调制相关文章:脉宽调制原理 调速器相关文章:调速器原理













评论