某无人机飞控系统半实物仿真平台设计
3.2 传感器与机载测控模拟分系统
可以模拟GPS接收机、磁航向、大气数据计算机等传感器特性,通过数字或模拟信号的形式输出到各相关分系统,供实际平台仿真使用。可设置的故障类型包括:
GPS接收机失效、航向跳变、大数据计算机高度跳变。
(1)应用软件开发环境的选择
由于该应用软件在设计过程时需要进行大量的软件界面开发,而Borland公司的C++Builder集成开发环境的最大优点在于其软件界面开发过程中的直接拖入方式,极大地方便了工程开发。因此选用C++Builder进行应用软件开发。
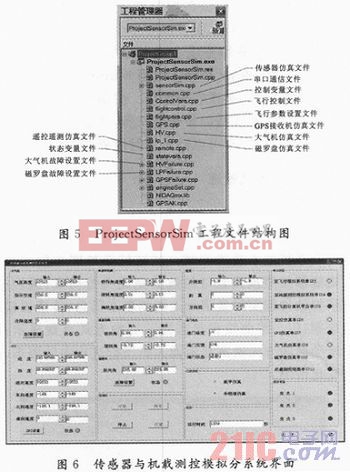
(2)软件总体设计构建
建立一个“ProjectSensorSim”的工程文件,包括如图5所示的工程文件,运行该工程文件后,生成分系统软件界面,如图6所示。本文引用地址:http://www.eepw.com.cn/article/159932.htm
3.3 遥控/遥测模拟分系统
该分系统用于模拟地面测控站基本功能,用于完成遥控指令的发送、遥测数据的接收。软件采用模块化设计,包括二维曲线绘制、航路装订、保存与删除、航迹绘制、串口处理、遥测数据接收、遥测信息处理、遥控指令处理等模块。
3.4 无人机外形显示分系统
外形显示分系统采用VC++2010软件,基于OpenGL进行开发。软件模块包括:通信接口模块、三维演示模块、仪表显示模块等。
3.5 软件开发过程中的两个关键问题
(1)降低系统间通信时间延迟技术
由于采用分布式、模块化结构,各分系统之间通过串口通信,难免会产生通信时延问题,在软件设计过程中采取了如下措施进行解决:
①减小飞行系统模拟软件的仿真步长,增加了飞行参数的连续性;
②提高飞行系统模拟、传感器与机载测控模拟与飞控计算机模拟三个分系统之间的姿态信息传输的串口波特率;
③优化传感器与机载测控模拟分系统与其他分系统之间串口数据通信的帧结构;确保姿态信息以最短的时间到达飞控计算机。
(2)工控设备数据实时性处理技术
由于传感器与机载测控模拟分系统采用工控机架构,需要同时与飞行系统模拟等多个分系统等进行数据通信,所有的任务均要求在毫秒级完成。在软件设计中,采用在Windows环境下应用Multimedia Timer(多媒体定时器)结合多线程来实现。应用多媒体定时器是计算机从硬件上支持的精确定时器,其定时误差一般可达到十微秒级,完全可以满足实时性要求。
4 平台功能测试验证
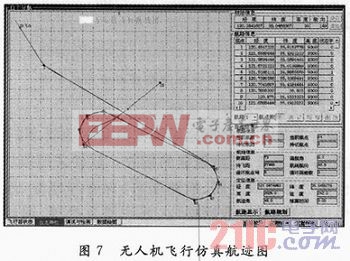
4. 1 飞控系统仿真测试功能验证
按图1连接平台各个组成部分,运行各应用软件,进行全系统基本功能测试。测试结果如图7所示。无人机能够按照预先装订的航路完成飞行仿真;遥控/遥测模拟软件能实时显示无人机的姿态信息、传感器模拟信息等,以二维曲线和状态指示灯的方式直观显示;以三维动画的方式逼真显示无人机飞行过程中的姿态、高度变化情况。










评论