一种并网逆变器功率跟踪控制策略研究
3 自抗扰控制器的设计及参数整定
3.1 自抗扰控制器原理
ADRC由跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈控制律(NLSEF)3部分组成。以二阶被控对象为例,图3为ADRC结构图。其中Z为系统给定,Z11为安排的过渡过程,Z12为Z11微分,Z21,Z22,Z23为估计量,u为控制量,y为系统实际输出,μ为所有扰动的综合。本文引用地址:http://www.eepw.com.cn/article/159808.htm
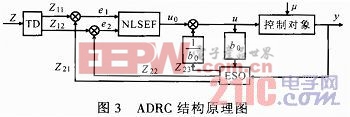
TD用来安排过渡过程,快速无超调地跟踪输入信号,并具有较好的微分特性,从而避免了设定值突变时,控制量的剧烈变化及输出量的超调,很大程度上解决了系统响应快速性与超调性之间的矛盾。也正因为如此,使得ADRC在快速性要求较高的场合受到一定限制。
ESO是ADRC的核心部分,可以将来自系统内部或外部的各种因素都归结为对系统的扰动。通过ESO估计出系统各个状态变量,同时估计出系统的内外扰动并给予相应补偿,从而实现系统的动态反馈线性化。TD输出与ESO估计值取误差得到系统状态变量误差。误差量送入NLSEF运算后与来自ESO的补偿量求和,最终得到被控对象的控制量。
由于ADRC是根据系统的时间尺度来划分对象的,所以在控制器设计时不用考虑系统的线性或非线性、时变或时不变,从而简化了控制器设计。
3.2 自抗扰控制器参数整定
一阶ADRC方程为: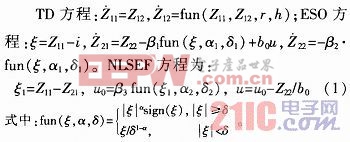
TD方程,ESO方程及式(1)中非线性函数fun用来安排过渡过程,其中r为速度因子,r越大,跟踪速度越快,h为步长。
ADRC控制性能主要取决于参数的合理选取,而参数的调整主要依靠设计者的工程经验,并利用仿真反复试选确定。对ADRC参数调整方法一般可分为两步,首先把TD/ESO/NLSEF看作彼此独立的3部分。整定TD和ESO的参数,待这两部分调整得到满意的效果后结合NLSEF对ADRC进行整体参数整定。将自抗扰控制技术引入基于电流跟踪的SVPWM光伏逆变器中,采用ADRC进行电流跟踪控制,用ESO对包括负载在内的未知扰动进行观测。通过ESO对负载变化及时、准确地估计和补偿,能有效抑制各种扰动带来的影响。
4 基于ADRC的并网逆变器控制系统
并网逆变器的控制目标是实现正弦电流输出和相位控制,使逆变器工作在单位功率因数并网模式或无功补偿模式。常见的电流控制方法有PID控制,但其对正弦参考量难以消除稳态误差。为了解决该问题,采用ADRC实现了正弦电流控制的零稳态误差,并在快速性与稳定性上优于常规PID控制器性能。
基于ADRC的光伏逆变器电流跟踪控制结构如图4所示。由于开关频率(10 kHz)远高于电网频率,因此为了便于分析,忽略开关动作对系统的影响,将SVPWM逆变单元近似为一惯性环节。滤波环节中,R为电感L的串联等效电阻,ug为电网电压,i*为与电网电压同频同相的并网电流参考信号。反馈信号从逆变器的输出接入,经ADRC进行参数调整,得到与参考指令相比较的信号,进而送入逆变器进行控制。

基于ADRC的光伏逆变器电流跟踪控制数学模型如图5所示,其输出电流的传递函数I=AI*-A(ugrid+其他扰动μ),其中A=Gpi(s)Ginv(s)/[sL+R+Gpi(s)Ginv(s)],Gpi(s)=(Kps+Ki)/s,Ginv(s)=KPWM/(TPWMs+1)。可见,逆变器的输出电流与参考电流、电网电压有关,采用ADRC闭环控制,能够抑制来自包括电网及其他方面的扰动。







评论