无源自适应控制Buck-Boost变换器研究
摘要:为获得良好的动、静态性能,在Buck-Boost变换器状态空间平均模型基础上,设计了系统无源控制器,它具有系统响应速度快,输出纹波小的特点,但当输入电源电压出现大幅扰动时,稳态输出存在偏差。针对此问题,提出一种无源自适应控制策略。对采用无源自适应控制策略的Buck-Boost变换器进行仿真,并在输入电压宽范围变化的助航灯光单灯回路上进行了实验,结果表明该变换器在满足静动态性能指标的同时,对宽输入电压扰动具有很强的鲁棒性。
关键词:变换器;非线性控制;无源性控制;自适应控制
1 引言
DC/DC开关变换器传统控制方式多采用PID控制。虽然PID控制的DC/DC变换器结构简单且易于调节,但该变换器是一个强非线性、时变、离散系统,具有非线性和时变不确定性,用常规的PID控制器很难达到理想的控制效果,因此采用先进的非线性控制策略至关重要。文献对解决负载扰动和降低系统超调关注比较多,较少考虑输入电源大幅度变化对DC/DC变换器产生的影响。此处将无源控制方法应用于非线性DC/DC变换器,在Buck-Boost变换器状态空间平均模型基础上,设计了系统无源控制器。针对无源控制在宽输入电源电压时稳态存在偏差的问题,提出了无源自适应控制策略。在该控制策略下,Buck-Boost变换器保留了无源控制自身响应速度快、输出纹波小的优点,同时对输入电源大幅度变化的扰动具有很强的鲁棒性。
此处以机场助航灯光单灯监控电源的数字控制DC/DC变换器为例,通过在输入电源宽范围(6~30 V)变化的助航灯光单灯监控电源中的应用实验,验证了无源自适应控制策略的可行性。
2 Buck-Boost变换器的无源化设计
2.1 无源性基本理论
若系统输入为u(t),输出为y(t),状态变量为x(t),存在连续可微的半正定的存储函数U(x)及正定函数Q(x)且满足如下条件:
![]()
那么系统是无源的。如果当u(t)=0,y(t)=0时,有![]() 成立,则该系统为严格无源的系统,存储函数就可成为Lyapunov函数。则使闭环系统在原点x=0全局渐近稳定的反馈控制器可给定u=φ(y),其中φ(y)为满足yTφ(y)0的函数。
成立,则该系统为严格无源的系统,存储函数就可成为Lyapunov函数。则使闭环系统在原点x=0全局渐近稳定的反馈控制器可给定u=φ(y),其中φ(y)为满足yTφ(y)0的函数。
2.2 Buck-Boost变换器无源性
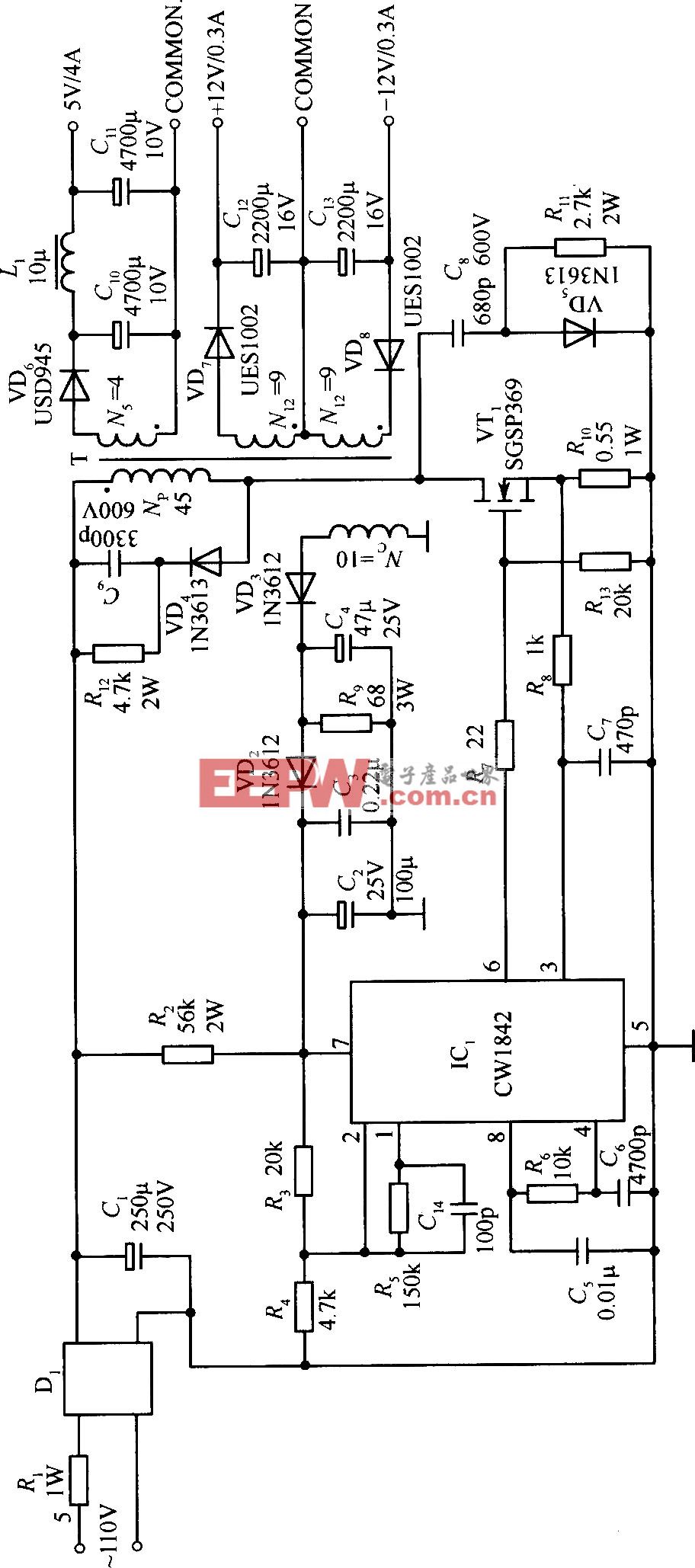
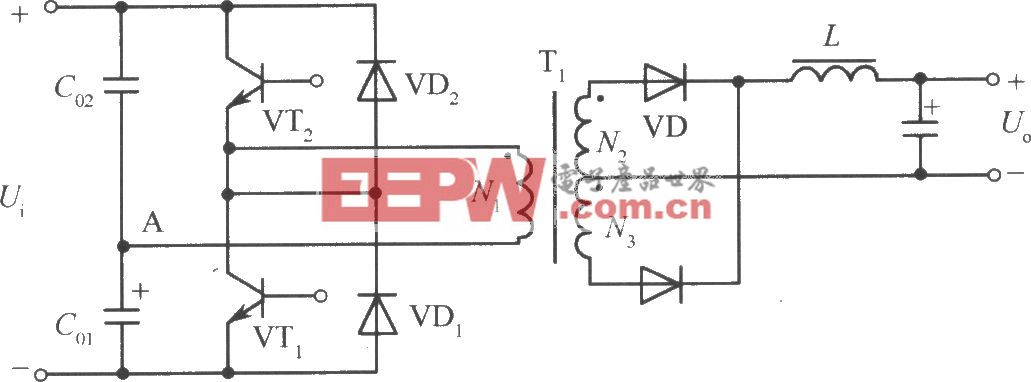
Buck-Boost变换器的主电路如图1所示,要进行系统无源控制器设计,可使用变换器的Euler-Lagrange数学模型。换器的Euler-Lagran ge数学模型与变换器的状态平均模型一致,假定变换器工作在连续状态,其状态空间平均模型为:
故系统是无源的。可通过函数φ(y)注入合适的阻尼,使系统输出误差渐近稳定到零点,系统状态及输出变量逐渐收敛到期望值。

pid控制器相关文章:pid控制器原理

评论