基于dsPIC30F6010的无刷直流电机的控制系统
(2)电流的测量。采样电流的检测一般是由采样电阻或电流传感器经滤波放大后送入控制器进行A/D转换,把数字量转化为模拟量。在本试验中采用0.03 Ω采样电阻来进行试验。
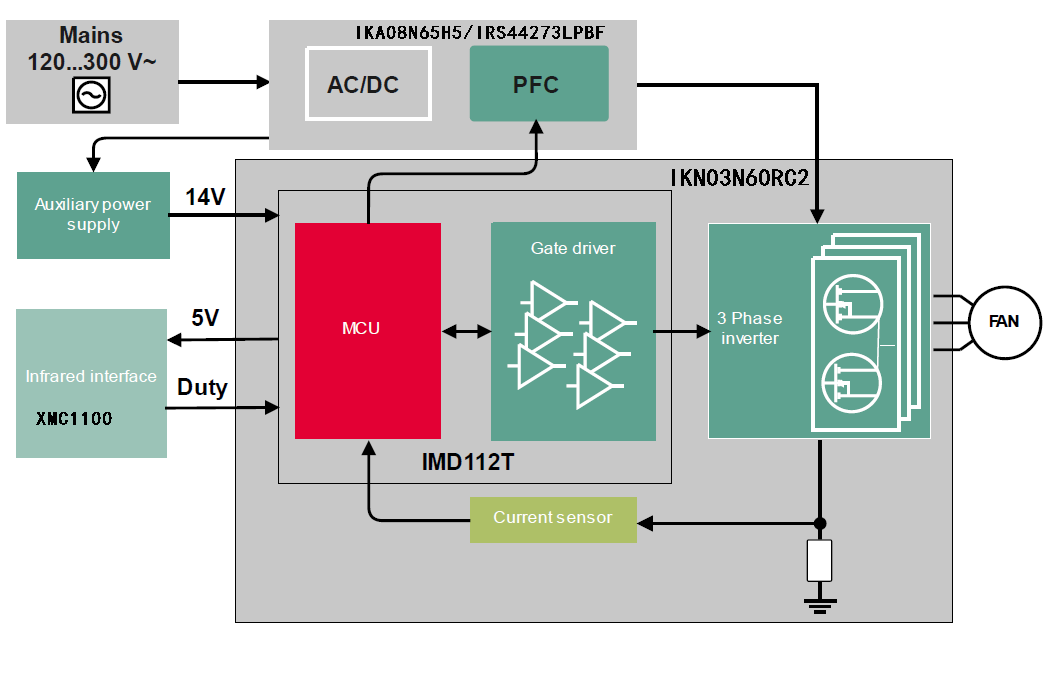
有位置传感器法无刷直流电动机硬件系统框图如图2所示。
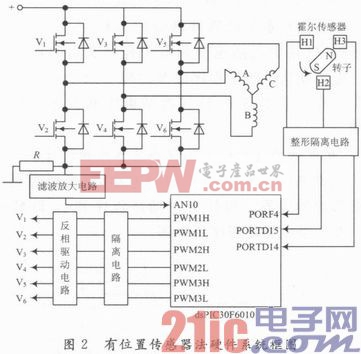
图中A、B、C代表无刷直流电动机定子绕组三相,V1~V6为功率开关管,由IPM提供。其中整形隔离电路由光耦TLP521对三个霍尔信号进行隔离处理。滤波放大电路主要采用放大器LM324N。
1.4 反电势过零检测法硬件系统
反电势法的基本原理就是在忽略永磁无刷直流电机电枢反应影响的前提下,通过检测“断开相”(逆变桥上下功率器件皆处于关断的那一相)的反电势过零点,来依次得到转子的六个关键位置信号,并以此作为参考依据,轮流触发导通六个功率管,驱动电机运转。三相无刷直流电动机每转过60°电角度需要换相一次,而转过一周需要6个换相点。每一个过零点延迟30°电角度即为换相点,那么只要找到感应电动势过零点,再将其延迟30°电角度即可找到换相点。
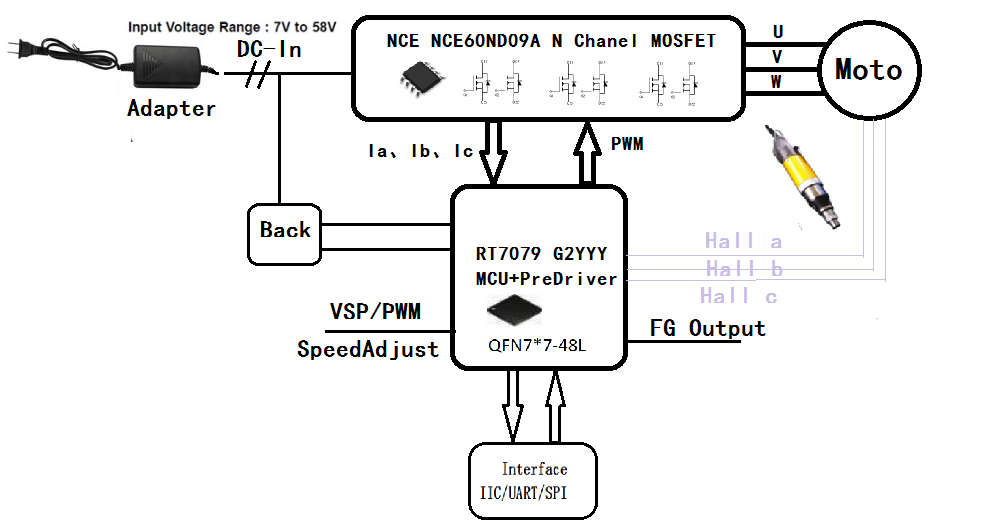
反电势过零检测法无刷直流电动机硬件系统框图如图3所示。
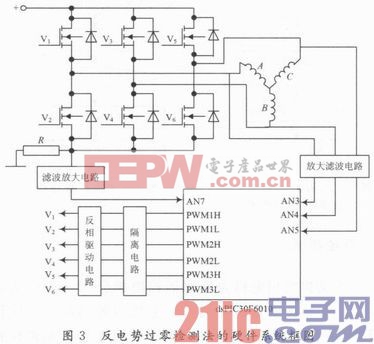
从图2,图3中可以看出,反电势法与有位置法硬件上的不同是检测位置信号的不同。它是由相电压检测电路取代位置传感器和测量电路。采用廉价的分压电阻和滤波电容组成相电压测量电路。电流信号和各相电压信号经过放大后,分别与控制器的AN3,AN4,AN5,AN7连接。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理









评论