基于神经网络的感应电动机直接转矩控制研究
4 实验结果
实验采用电机为三相鼠笼式异步电动机,测得磁通的α,β分量波形如图5a所示,电机气隙磁通轨迹如图5b所示。本文引用地址:http://www.eepw.com.cn/article/159427.htm
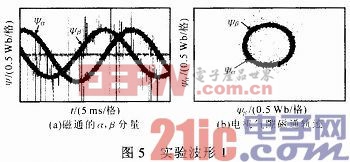
可见,电机的气隙磁场分布更加均匀,进一步改善了电机控制的性能。将该系统应用在矿山的牵引变频电机上取得了良好的效果。
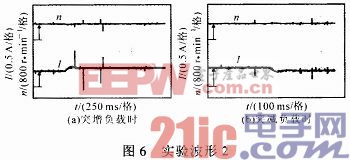
图6为系统突增负载和突减负载运行时电流、转速动态波形。可见,波形稳定平滑,超调量约为0.8%,动态速降约为5 r·min-1,静差率约为零。电机实现无静差调节且方便实现可逆运行。
5 结论
感应电动机的直接转矩控制具有结构简单,控制信号处理的物理概念明确,系统的转矩响应迅速且无超调等优点,是一种具有高静态、动态性能的交流调速控制方式。将神经网络控制和直接转矩控制相结合,由于神经网络结构简单,具有并行计算能力,缩短了计算时间,且控制算法不依赖或不完全依赖于对象模型,仅取决于系统的实际偏差及变化率,具有容错能力,因而系统具有较强的鲁棒性和对环境的适应性,使进一步提高开关频率成为可能,提高了系统的控制性能。

电动机相关文章:电动机工作原理设计
施密特触发器相关文章:施密特触发器原理








评论