基于神经网络的感应电动机直接转矩控制研究
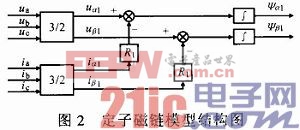
由式(2)可得定子磁链模型结构如图2所示,在静止两相坐标系下电磁转矩表达式为:
T=npLm(iβiα2-iα1iβ2) (3)本文引用地址:http://www.eepw.com.cn/article/159427.htm
两相静止坐标系下的磁链方程为: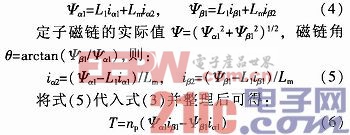
由式(6)得转矩模型结构图如图3所示。

在DTC技术中,其基本控制方法就是通过电压空间矢量us(t)来控制定子磁链的旋转速度及定子磁链运行状态,以改变定子磁链的平均旋转速度的大小,达到控制转矩的目的。DTC系统的核心问题:①转矩和定子磁链反馈信号的计算模型;②如何根据两个Bang-Bang控制器的输出信号来选择电压空间矢量和逆变器的开关状态。
3 神经网络PID控制器的设计
系统中应用的神经网络控制器由BP神经网络和控制器两部分构成。神经网络根据系统的运行状态调节控制器的参数,以期达到最佳的控制效果。人工神经网络的神经元结构如图4所示。
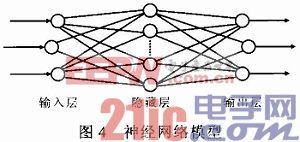
人工神经网络是基于人脑的神经元结构的电子学模型,一个神经网络的基本执行要素是神经元。神经网络依赖于神经元的层数。人工神经网络对知识的掌握是通过对样本的学习实现的。通过学习大量的实例,网络用尝试错误的方法来不断减小错误,修正权值,从而掌握蕴含于样本的知识,网络通过权值的调整记录所学过样本,并掌握输入与输出之间的关系。正是因为它的可任意逼近非线性模型特性,所以十分适用于交流调速系统的控制。人工神经网络在交流调速控制系统中的应用包括神经网络辨识器和神经网络控制器的设计。在传统的数字PID控制方式下,采用的经典算式为增量式PID算法:
u(k)=u(k-1)+△u(k)=u(k-1)+kp[e(k)-e(k-1)]+kie(k)+kd[e(k)-2e(k-1)+e(k-2)] (7)
神经网络根据系统的运行状态调节PID控制器的参数,使输出层神经元的输出状态对应于PID控制器3个可调整参数kp,ki,kd。通过神经网络的自学习,权系数调整,使神经网络输出对应于某种最优控制规律下的PID控制器参数。
输入层神经元个数选为3,误差量x1(k)=e(k),x2(k)反映误差的累计效果,![]() ,x3(k)反映误差变化快慢,x3(k)=e(k)-e(k-1)。输出层的神经元个数选为3,输出节点分别对应kp,ki,kd。由于该参数不能为负数,所以输出层神经元的激发函数取非负的Sigmoid函数。隐藏层的神经元个数可由经验公式q=(n+m)1/2+f确定,其个数选为4。
,x3(k)反映误差变化快慢,x3(k)=e(k)-e(k-1)。输出层的神经元个数选为3,输出节点分别对应kp,ki,kd。由于该参数不能为负数,所以输出层神经元的激发函数取非负的Sigmoid函数。隐藏层的神经元个数可由经验公式q=(n+m)1/2+f确定,其个数选为4。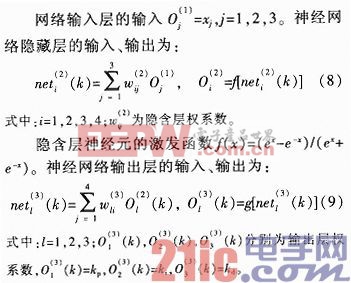
输出层神经元的激发函数![]() 。按梯度下降法修改网络的权系数,即按照e(k)对权系数的负梯度方向搜索调整,并附加一个使搜索快速收敛的全局极小惯性项。
。按梯度下降法修改网络的权系数,即按照e(k)对权系数的负梯度方向搜索调整,并附加一个使搜索快速收敛的全局极小惯性项。

电动机相关文章:电动机工作原理设计
施密特触发器相关文章:施密特触发器原理







评论