3 焊接机器人控制仿真
采用柔性连接的机械手作为仿真对象,如图4所示。

图4 机械手示意图
利用拉格朗日方法可以导出如下动力学方程:

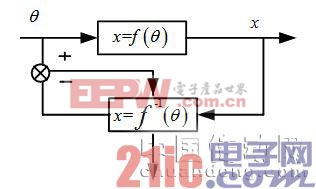
图5 神经网络逆向辨识结结构图
给定正弦激励信号,运用Matlab程序代码文件对该控制系统仿真。迭代学习控制曲线和传统PID控制响应曲线如图6所示。
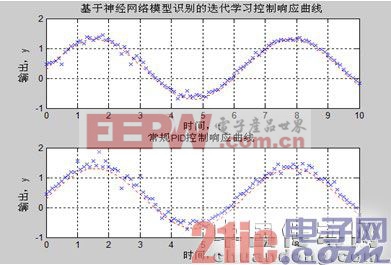
图6 基于神经网络模型识别的迭代学习控制响应曲线与常规PID控制响应曲线
4 结论
从仿真结果可以看出,本文提出的基于神经网络辨识模型迭代控制方案控制效果明显优于传统的PID控制,该控制策略跟踪精度高,超调量小,能够有效地提高系统的控制精度。同时,优化该控制策略可应用于其他机器人跟踪控制系统,使系统投入到更广阔的机器人控制领域。












评论