基于AGA的仿人机器人PID控制参数优化
从优化结果来看,PID控制精度有明显的提高,AGA算法以最大迭代次数作为终止条件,收敛速度相对较慢但优化结果准确,说明遗传算法具有较强的全局寻优能力。
进入ADAMS/PostProcessor模块,可以将AGA优化仿真结果跟ADAMS软件自带的SQP优化模块仿真结果进行对比,图4的上半部分为AGA优化结果,下半部分为SQP优化结果,在两种算法中,控制偏差随时间的变化趋势大体相同,且偏差值大小相比为优化前都有大幅的减小,充分体现了优化设计在控制系统中的作用,如图4。
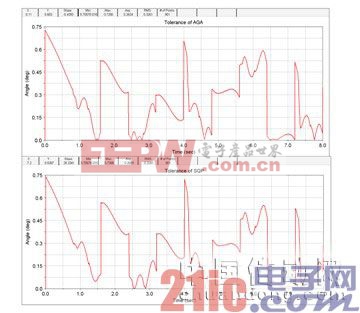
图4 优化目标函数值对比
此外通过对目标函数进行数据处理,查看目标函数在控制过程中的最大值、最小值以及平均偏差值,可知使用遗传算法进行的控制优化,无论目标函数的最大值还是平均值,都比采用ADAMS自带的SQP算法的计算结果要小,见表1。
表1 目标函数各项数值对比

将AGA优化后的仿人机器人左膝关节角运动过程的实际轨迹跟理论轨迹重合情况跟优化前进行比较,图中,蓝色虚线表示关节角的实际轨迹,红色实线表示关节角的理论轨迹。仿真结果,如图5和图6。
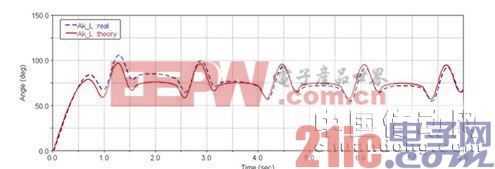
图5 优化前关节理论与实际轨迹重合情况
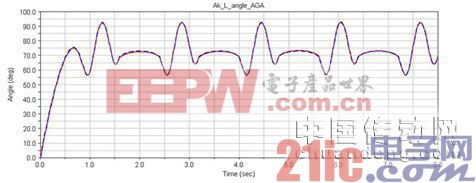
图6 优化后关节理论与实际轨迹重合情况
比较图6与图7中可以看出,控制系统经过自适应遗传算法优化后,其控制性能较之优化前有极大提升,关节运动的实际轨迹与理论轨迹更加接近,保证了仿人机器人行走的稳定性、可控制精度,提高了控制系统的实时响应速度,证明了基于遗传算法的PID控制系统参数优化方法的正确性。
4 结论
针对仿人机器人PID控制系统参数确定存在的问题,本文提出了基于自适应遗传算法定PID控制参数优化方法。将三个参数作为遗传算法的个体,采用仿人机器人的理论关节轨迹与实际关节轨迹的最大偏差值作为目标函数,适应度函数与之相对应,采用适应度比例选择策略,可以有效避免在遗传算法的后期丢失最优个体的可能,以保证机器人控制系统参数选择精度。通过ADAMS仿真结果对比分析,优化后的仿人机器人控制系统的控制精度、响应速度都有明显提高,说明了基于自适应遗传算法的PID控制能够得到比传统PID控制更优的结果。
参考文献
[1]金奇,邓志杰.PID控制原理及参数整定方法[J].重庆工学院学报,2011(7):91-94.
[2]于晓敏,于晓坤,耿蕊.PID控制器参数优化算法的仿真研究[J].计算机仿真,2008(5):212-215.
[3]姜玉春,吴红燕.PID控制器的参数整定[J].莱钢科技,2006(2):54-55.
[4]朱盈,朱俊.多种PID控制及其仿真比较[J].工业控制计算机,2010(1):53-54.
[5]牛芗洁,王玉洁,唐剑.基于遗传算法的PID控制器参数优化研究[J].计算机仿真,2010(11):180-182.
[6]WANGP,KWOKDP. OptimaldesignofPIDprocesscontrollersbasedongeneticalgorithms[J].ControlEngPrac,1994,2(4):641-648.
[7]杨智民,王旭,庄显义.遗传算法在自动控制领域中的应用综述[J].信息与控制,2000,29(4)14-17.
[8]张可村,李换琴.工程优化方法及其应用[M].西安:西安交通大学出版社,2007.
[9]黄友锐.智能优化算法及其应用[M].北京:国防工业出版社,2008.

pid控制相关文章:pid控制原理
dc相关文章:dc是什么
pid控制器相关文章:pid控制器原理











评论