永磁同步电动机反馈线性化控制系统设计研究
3.1 辅助电源设计
辅助电源是整个系统正常工作的基本保障,在系统中,通过变压器和三端稳压集成电路,得到5 V,20 V,-15 V,15 V。结构示意图如图3所示。其中,5 V再通过芯片TPS767D318转换成3.3 V和1.8 V供给DSP,同时供给译码保护电路;20 V为三相逆变桥中6个IGBT的驱动电源,3路为IGBT上桥臂驱动电源并相互隔离,1路为IGBT下桥臂公共驱动电源:-15 V和15 V主要提供给A/D调理电路中运算放大器、传感器及故障信号处理电路的比较器使用。本文引用地址:http://www.eepw.com.cn/article/159382.htm
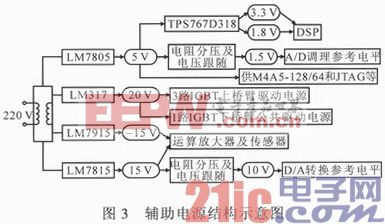
该平台采用TPS767D318型双端输出电源管理芯片来实现5 V向3.3 V,1.8 V电压转换。
3.2 逻辑保护译码设计
系统中D/A输出的译码信号、PWM死区保护和故障保护信号等通过一块CPLD ISPM4A5-128/64实现。ISPM4A5借助于Lanice的ispLEVER软件开发环境,实现功能和时序仿真并生成可执行文件。其供电电压为5 V,输出为3.3 V,与DSP连接无需电平转换电路。输入信号为:IGBT功率管开关控制PWM信号、过流保护信号、过压保护信号、译码地址信号、故障复位信号、电源复位信号。输出信号为:D/A通道选择译码输出,74F245使能信号、DSP功率保护信号、故障指示信号等。其中,晶体振荡器频率为10 MHz。
3.3 采样电路
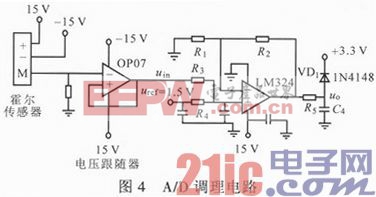
系统中霍尔电压、电流传感器采集到的信号,通过电压跟随器后输出uin送至A/D调理电路。由于DSP的A/D输入端仅能接收0~3 V信号,所以由传感器输出的交流信号还要经过电平抬升电路,A/D调理电路如图4所示。uin来自霍尔传感器电压跟随器的输出,取参考电平uref=1.5 V,通过采用运算放大器IM324构成同相比例运算电路,uo送给DSP的A/D输入端。输入与输出的关系为:
![]()
R5与C4构成低通滤波器,用于消除高频开关信号干扰。二极管1N4148实现箝位保护功能,防止由于电压过高而烧坏DSP。
3.4 驱动电路
采用HCPL3120光电耦合和稳压二极管等器件构成IGBT驱动电路,如图5所示。利用光耦实现PWM弱信号与IGBT功率电路电气隔离,以保证DSP控制系统的安全性。
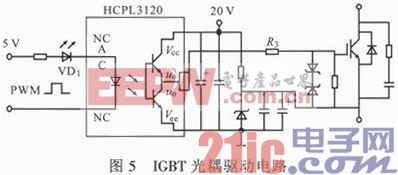
在IGBT门极与发射极之间加15 V电压,使IGBT导通,加-5 V电压时IGBT关断。当PWM为低电平时,光耦初级导通,次级输出电压uo=20 V,通过R3=8.2 Ω加在IGBT门极,而参考电压为5 V,这样IGBT门极与发射极问的电压为15 V,IGBT导通。当PWM为高电平时,光耦初级截止,IGBT门极与发射极之间的电压为-5 V,IGBT关断。发光二极管VD1用于指示IGBT开关情况。
3.5 光电编码器信号检测电路
所使用的控制策略中需电机转速信息。采用增量式光电编码器对转速进行测量,系统采用TLP550光耦来实现光电编码器与DSP之间的连接。
4 实验研究
采用TYB150-4-100型PMSM参数为:额定电压190 V,额定电流6.2 A,额定转速1 500 r·min-1,额定功率1.5 kW,额定频率50 Hz,极对数2,直轴电感12.765 mH,交轴电感7.695 mH,定子电阻1.2 Ω,转子磁链感应到定子侧0.42 Wb。
为验证该控制系统设计的可行性,编制了PMSM DTC反馈线性化算法软件进行实验研究,定子磁链给定为0.42 Wb,转矩限幅为9 N·m,DSP控制周期为100μs。转速环PI调节器比例系数为0.01,积分系数为0.005,k1=k2=4 000。
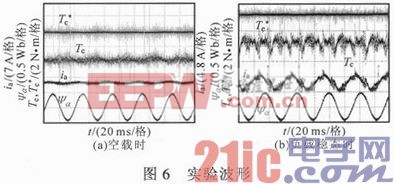
电动机转速680 r·min-1,空载时波形见图6a。可知:①实际转矩跟踪给定转矩:②α轴定子磁链为正弦波,幅值为0.42 Wb;负载稳态波形见图6b 。可知:①实际转矩跟踪给定转矩均值为2.6 N·m;②α轴定子磁链为正弦波,幅值为0.42 Wb。由实验波形可知,硬件系统运行可靠。
5 结论
以TMS320F2812型DSP为核心,设计了一套直接转矩控制永磁同步电机反馈线性化控制系统。结果表明,该系统工作可靠,响应速度快,其硬件系统的设计将为直接转矩控制永磁同步电机反馈线性化系统控制策略的深入研究奠定良好基础。
















评论