基于广义预测的蒸氨槽氨压控制系统研究
2.4管道模型
忽略气体传输过程中管道损耗,由于输送管道很长,加上原料氨水反应及氨气蒸出过程的影响,管道内的气体传输过程必然造成严重的纯滞后。为便于分析,管道模型可以用
2.5蒸氨槽氨压系统模型
由前面各个单元建立模型,推导蒸氨槽氨压系统模型:

其中,
令
由上述公式推导得到蒸氨槽氨压控制系统数学模型为:
引入系统管道模型即延时环节得到:

由上式可知蒸氨槽氨压主要由供料泵的转速控制,出口调节阀阀门开度及出口端压力在一定范围条件下不变,得到转速对蒸氨槽氨压的传递函数为形如一阶惯性加纯滞后环节:
惯性时间常数T:被控对象在缺乏控制器调节的情况下,从接受外界输入时间开始,系统输出自行到达新的稳态值所需要的时间。它表征了被控对象动态响应的特性,如果时间常数
滞后时间
广义对象比例放大系数
3蒸氨槽氨压广义预测控制
由前面对蒸氨槽氨压控制过程特性的分析,被控对象为一阶惯性加纯滞后环节,由于蒸氨过程中外界环境干扰参数变化导致模型失配,常规控制算法显然对蒸氨过程控制效果不佳。
针对铁红蒸氨过程控制中被控对象具有时滞性,并且依赖控制过程的精确数学模型特点,选择对于模型依赖程度较低、具有自适应能力以及鲁棒性较强的预测控制算法GPC。在铁红蒸氨槽氨压控制系统中,利用广义预测控制的多步预测及控制时域补偿时滞,判断未来的控制作用趋势,通过滚动优化作用求取当前最佳的控制作用即。同时由于具有模型在线辨识与反馈校正功能,对于参数变化及环境干扰模型失配等具有较强的自适应能力,因此铁红蒸氨槽氨压系统设计灵活方便,具有良好的控制性能和鲁棒性[3]。
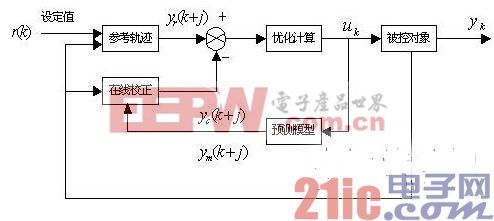
图4 蒸氨槽氨压广义预测控制系统结构图
3.1预测模型
假设被控对象基于阶跃响应的预测模型向量为
3.2滚动优化
式(21)可写成向量形式:
考虑不希望控制增量变化过于剧烈,因此,k时刻的优化性能指标的向量形式可取为:

将式(3)代入式(4),并通过极值必要条件dJ(k)/dΔuM=0可求得
3.3反馈校正
当k时刻把控制量u(k)施加于对象时,利用预测模型(2)可算出未来时刻的输出预测值
式中:
 本文引用地址:http://www.eepw.com.cn/article/159353.htm
本文引用地址:http://www.eepw.com.cn/article/159353.htm

陀螺仪相关文章:陀螺仪原理











评论