基于TC1782的永磁同步电机控制系统
2.2.2 硬件设计
本文引用地址:http://www.eepw.com.cn/article/159023.htm依照PMSM主控制器所需要的功能、实际参与控制的对象以及主控制芯片的特点,PMSM电机控制系统主控制器硬件结构如图4所示。它采用了功能划分和模块化的设计思想,并根据功能需求分离成不同的功能模块。主控制器的主要接口技术参数为:1)14路模拟量输人通道(12比特);2)6路PWM输出(带电平转换);3)2路CAN通讯接口(支持标定和系统通讯);4)可配置并行或串行通讯的旋变接口电路(AD2S1210);5)数字量输入(故障检测与诊断等);6)数字量输出(急停控制与主继电器控制等);7)电源系统。
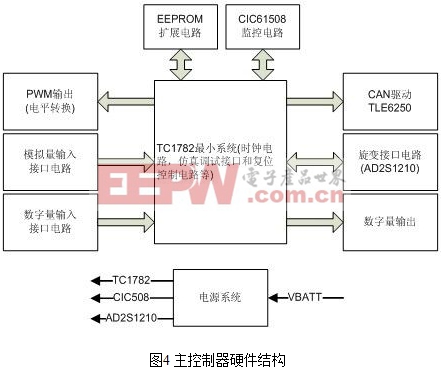
PMSM电机控制系统要求具有较高的安全等级,驱动器对主控制器的故障响应时间有着严格的要求,因此主控制器采用了符合ISO26262功能安全规范的监控芯片CIC61508设计监控电路。CIC61508具有可配置的电压监控输入,可配置的主CPU任务执行时间和可配置的故障响应时间及输出,可以实时监控主CPU的供电和软件的运行状况,按照预先配置好的故障响应输出控制其他IC的使能与复位引脚,从而实现系统的功能安全要求。
2.2.3 软件设计
PMSM电机的控制系统方案主要以磁场定向控制FOC为主(图5), 另外为达到最佳控制效果, 常常几种控制方案结合运用, 如采用最大转矩控制和弱磁控制原理(图6)以实现电机的效率最优和宽范围的调速方案, 集转矩控制和PWM 控制于一身的控制方案等[3]
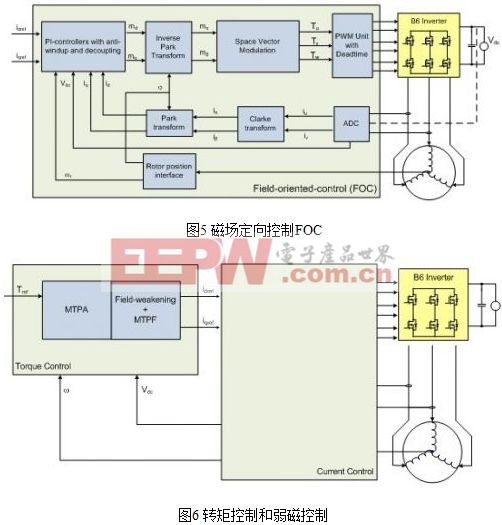
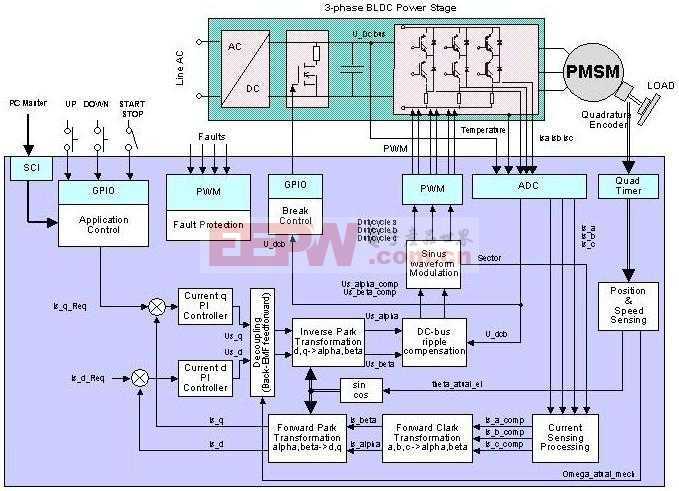
图5和图6中的PMSM电机控制系统方案中表明TC1782除了要完成和FOC相关的计算,如Clark,Park,i-Park和SVM[4]计算外,还需要对系统的一些信号进行采集,如相电流,母线电压,电机位置和转速等。另外考虑到主控制器参与系统通讯,以及功能安全上的要求,这些都将对单核CPU的负载是一个严峻的挑战。基于以上因素,按照主控制器的功能要求,将主控制器的软件开发模块化,分配给TC1782的主CPU和外设协处理器PCP,从而形成如图7所示的软件流程结构框架。
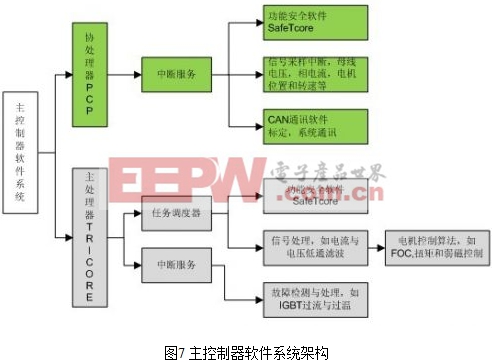
图7所示的软件系统架构中,主CPU在一个小型任务调度器的基础上,分别调用了英飞凌安全功能软件SafeTcore和PMSM电机控制相关算法软件,SafeTcore在CPU运行时循环检测系统的故障,测试项目可以依照要求进行配置,所运行的PMSM电机控制算法采用图5和图6中所示的控制策略进行。外设协处理器PCP除了运行安全功能软件SafeTcore软件监控主CPU的运行外,还可以处理和通讯相关的中断和信号采样中断等,从而降低主CPU的中断负载。
矢量控制相关文章:矢量控制原理










评论