基于全球星实现无人机远程通信
无人飞行器(Unmanned Aerial Vehicle,UAV)可分为无人机、导弹和靶标三大类。其中无人机已被广泛应用于诸如侦察、监视、诱饵、电子战、通信中继、农业勘测、气象、交通、科学研究、民用导航、环境保护、自然灾害的监视与救援等领域。与有人驾驶的飞机相比,无人机机动性能好,过载能力强,不存在飞行员伤亡;与侦察卫星相比,无人机飞行高度低,活动范围可控,部署方便,造价低廉。目前,世界各国都在积极研制各种新型无人机。
新型无人机对通信设备性能有了更高的需求,在通信距离上已超出视距范围,在通信带宽上需要能够传输图像、视频等综合信息。这给无人机通信设备的研制提出了新的课题。根据研究表明,数字微波通信和卫星通信可以满足无人机与地面之间远程综合信息传输的需求。
l 全球星系统性能分析
全球星系统是由美国劳拉公司(Loral Corpara-tion)和高通公司(Qualcomm)倡导发起的卫星移动通信系统。全球星系统主要由三部分组成:空间段、地面段、用户段。
空间段由48颗卫星加8颗备份星组成。轨道高度
约为1 414 km,传输时延和处理时延小于300 ms,因此,用户感觉不到时延。整个系统的覆盖区为南北纬70°以内的地区。各个服务区总是被2~4颗卫星覆盖,用户可随时接人该系统。话音传输速率有2.4/4.8/9.6 Kb/s三种,数据传输速率为7.2 Kb/s(持续流量)。卫星采用码分多址方式(CDMA),码元带宽为1.23 MHz。卫星定位精度最高可达300 m。
地面段包括全球星控制中心和网络关口站(简称:网关)。每个网关可同时与3颗卫星通信,把来自不同卫星或同一卫星的不同数据流信号组合在一起,以提供无缝隙的覆盖。每一个用户终端可通过一颗或几颗卫星和网关实现与全球任何地区的通信。在我国境内设有一个网关。
用户段指的是使用全球星系统业务的用户终端设备。用户终端设备包括手持式、车载式和固定式。用户终端可提供话音、数据、短信息等业务。用户终端在头顶有一颗卫星覆盖时就可以使用,而一般在用户的视线范围内都是有2~4颗卫星。用户终端可同时和3颗卫星进行通信,并且通过使用分离多径接收器可以把这些信号合成一个单一的、没有天电干扰的信号。用户终端还可以按需要改变功率电平来补偿遮挡和干扰的影响,平均功率输出范围在50~300 mW之间。卫星不断移进、移出用户终端的视线范围,也不断无缝隙地淡进和淡出呼叫过程,这种软切换减少了呼叫受干扰的风险。以上这些先进的数字技术使全球星系统能够在各种地形环境中提供业务,使信号受到建筑、地形和其他自然景物遮挡的可能性更小。
针对无人机的特点,利用全球星的独特通信功能,可以设计一个基于全球星的无人机数字通信系统,用以解决新型无人机远程综合信息通信问题。
2 系统结构设计
本系统由机载通信设备、地面通信设备、地面监控设备、全球星卫星、网关等组成,如图1所示。

2.1 全球星系统
全球星卫星和网关作为本系统的卫星通信链路,负责转发系统各种通信信息。
2.2 机载通信设备
机载通信设备安装于无人机上。机载设备将需要传输的数字信息(语音、图像、数据流、控制命令等)通过USB口或RS 422口传送给机载通信设备,机载通信设备将信息打包发送至全球星卫星,由全球星卫星转发到地面通信设备。
机载通信设备主要由ARM与GSPl620等部件组成,如图2所示。

GSPl620为全球星数传通信模块,通过RS 232口与ARM连接,完成通信信息的发送与接收。
ARM为工业控制单片机,通过RS 422口或USB口与机载设备连接。ARM中安装有通信软件,完成系统初始化、数据通信、故障诊断等功能。
机载数传设备的工作流程如下:
ARM启动后,通过RS 232口发送AT命令对GSPl620进行初始化和拨号连接,同时监测RS 422口或USB口,实时获取并存储机载设备发送的通信数据,如果GSP1620拨号连接成功,则将通信数据通过RS232口发送给GSP1620,由GSPl620通过全球星卫星发送给地面通信设备。GSPl 620也负责接收地面通信设备发送的控制指令(例如:飞机爬升、俯冲、转弯等命令),通过RS 232口传送给ARM,ARM接收到控制指令后再通过RS 422口或USB口转发给机载设备。
2.3 地面通信设备
地面通信设备与机载通信设备软硬件通用,只是在使用前初始化时将设备定义为地面通信设备或机载通信设备。地面通信设备安装在地面监控站内,与地面监控设备通过,RS 422口或USB口连接。地面通信设备将接收到的全球星卫星传输的数字信息(语音、图像、数据流、控制命令等)通过USB口或RS 422口传送给地面监控设备,同时也可将地面监控设备的控制命令传送给机载通信设备。
其结构组成与机载通信设备相似,主要由ARM与GSPl620等部件组成。如图3所示。
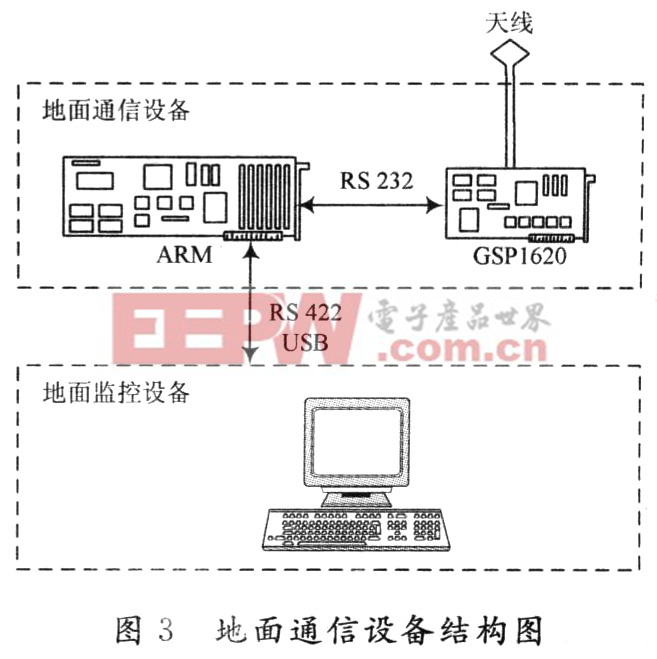
地面通信设备的工作流程如下:
ARM启动后,通过RS 232口发送AT命令对GSP1620进行初始化和拨号连接,连接成功后在GSPl620上实时获取机载通信设备发送的通信数据,同时通过RS 422转发给地面监控设备。ARM也负责接收地面监控设备发送的控制指令,通过RS 232口转发给GSPl620,GSPl620接收到控制指令后发送给机载通信设备。
2.4 地面监控设备
地面监控设备为工业PC机,运行通信监控软件。地面监控设备通过RS 422口或USB口与地面通信设备连接。完成数据通信、无人机态势显示、控制指令上传、报警、数据管理等功能。
3 系统功能设计
根据目前无人机的使命任务,本系统提供有如下功能:数传通信功能、监控功能、显示功能、报警功能、数据管理功能等。按模块设计的功能框图和信息传输关系,如图4所示。
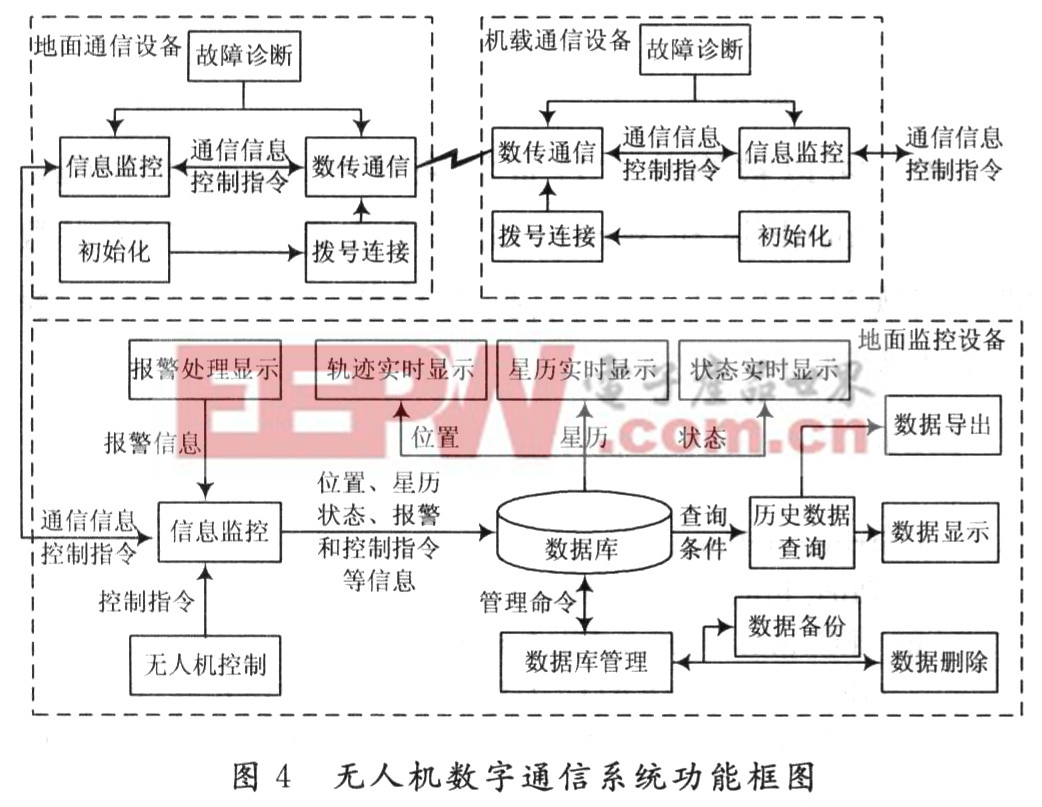
3.1 数据通信
数据通信功能主要包括以下几项内容:数据加密、数据分包、数据分包传输、数据接收、数据合包、数据解密等。
3.2 监控功能
监控功能主要包括以下几项内容:对地面监控设备初始化、系统重置、通信端口管理、生成控制指令、数据存库等。
3.3 显示功能
显示功能主要包括以下几项内容:地图背景显示、鹰眼显示、地图基本操作(放大、缩小、漫游、量算等)、无人机飞行状态(包括轨迹、高度变化、飞行参数等)显示、全球星星历状态显示等。
3.4 报警功能
报警功能主要包括以下几项内容:全球星链路断开报警、无人机飞行状态报警等。报警模式有声音报警、高亮警示报警等。
3.5 数据管理功能
数据管理功能主要包括以下几项内容:数据备份、恢复、数据删除、数据报表查询、数据显示、数据打印、数据导出(文本文件、EXCEL 文档)等。
4 系统软件设计
4.1 软件流程
4.1.1 初始化阶段
接受飞行任务后,地面监控设备与地面通信设备开机、初始化,地面通信设备接收全球星星历,发送到地面监控设备,地面监控设备根据星历判断卫星信号好坏,给出无人机起飞建议。无人机起飞后,机载通信设备开机、初始化。
4.1.2 建立连接阶段
机载数传设备初始化后与地面数传设备进行拨号连接,双方均可进行主叫拨号连接。拨号成功,链路建立后,即可进行通信信息传输。
4.1.3 通信、监控显示阶段
机载通信设备将来自机载设备的通信信息经全球星发送给地面通信设备,地面通信设备再将该信息转发给地面监控设备。地面监控设备对信息进行解码、报警处理、存储、轨迹显示、状态显示等工作。
4.1.4 连接维护阶段
为了保证通信链路的畅通,机载通信设备和地面通信设备自动进行卫星通信链路的维护,实时监测链路状态,发现链路断开,自动重新拨号连接。同时也负责将链路状态、故障原因实时发送给地面监控设备。









评论