基于CAN总线和Internet的分布式网络监控系统
3.3can通信协议的制定
在can分系统里,报文结构采用can2.0b协议的标准帧结构。数据帧由7个不同的位场组成:帧起始、仲裁场、控制场、数据场、crc场、应答场、帧结尾。其中,仲裁场由11位标识符(id28~id18)和rtr位组成,依次从id28~id18发送,并且高7位(id28~id22)不能全是“隐性”。
根据can总线逐位仲裁原理和分布式监控系统各部分的特点,将仲裁场的11位标识符作以下设计。
(1)id28~id26定义为优先级。可规定0~7个级别,具有最高优先权的节点首先发送数据。当相同优先级别的报文同时发送时,继续在仲裁域内往后进行逐位仲裁,直至有节点胜出为止。
(2)id25~id24规定为高低速can的标识。用来区分高速与低速can报文。其中00表示高速,01表示低速。
(3)id23~id18用于节点信号的分类,可留做具体组网时进行分配。本文引用地址:http://www.eepw.com.cn/article/157820.htm
4系统硬件设计
4.1can总线节点硬件电路设计
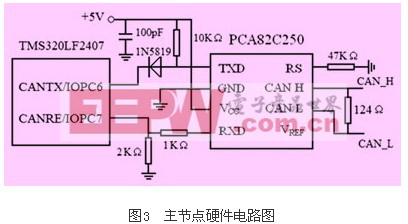
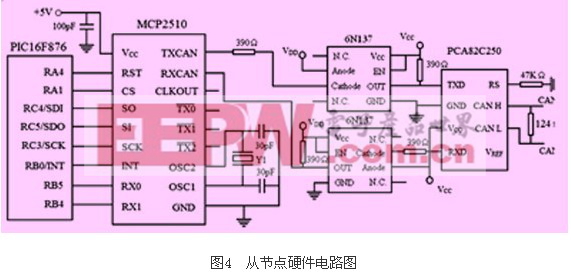
can总线硬件节点分主节点与从节点两种。主节点为can网关,从节点分数据采集节点和控制节点两种。由于can网关的数据处理量相对较大,采用ti公司内置can驱动器的dsp处理器tms320lf2407。数据采集节点和控制节点只需采集和处理与本节点相关的信息,故采用microchip公司的单片机pic16f876和can控制器mcp2510。pic单片机处理速度快,成本低,且具有极强的抗干扰能力,适合用在工业现场做数据采集和控制。主从节点硬件电路原理图如图3和图4所示。
4.2internet通信网络设计
internet节点使用普通的工控机,工控机可通过以太网卡与其它上位机和系统服务器进行通信,在此不做详细介绍。
5系统软件设计
系统软件分为主程序、数据采集和处理、输出控制和显示、can总线通信等程序。数据采集又分为开关量扫描、模拟量采集、脉冲量采集等程序。can总线通信程序包括can初始化、数据发送、数据接收等。
5.1can节点主程序
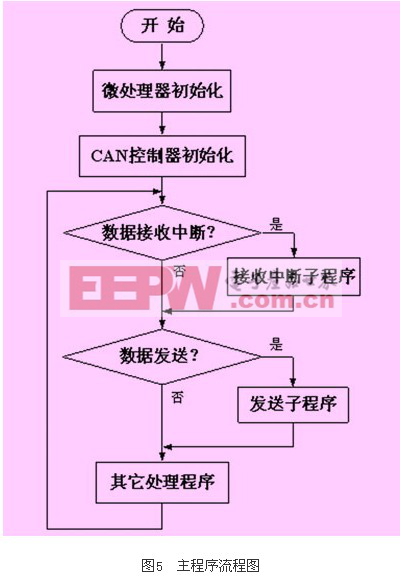
系统主程序主要包括微处理器初始化,can控制器初始化,数据的采集与处理和输出控制和显示等部分。系统主程序流程图见图5。












评论