基于CSS技术的室内定位通信系统的研究与实现
无线定位技术近年来在工业和研究领域受到了极大的关注,高精度的定位服务在移动通信、智能交通和医疗等领域都具有广泛的应用前景。目前使用最广的是 GPS定位系统,其在室外环境下具有很突出的性能,能为飞机、船舶和车辆等目标提供精确的定位信息和导航服务。但是GPS系统的定位信号无法穿透建筑物, 不能完成对室内目标的定位[1]。针对无线定位领域,IEEE802.15.4a定义了两种可实现高精度定位的物理层——脉冲超宽带和Chirp扩频 (CSS)[2-3]。Chirp信号又称线性调频信号,最先应用在雷达领域,随着声表面波(SAW)器件发展,其扫频带宽不断增大,已经具有了一般超宽 带信号的特点。Chirp扩频信号具有时间分辨率高、抗多径能力强、传输速率高、功耗低和系统复杂度低等特点,非常适合用于室内目标定位[4-6]。
本文设计了基于Chirp扩频信号的室内定位通信系统,在利用Chirp扩频信号实现数据通信的基础上,使用双边双向测距算法SDS- TWR(Symmetric Double Sided Two-Way Ranging)测量端点间的距离[7],计算出标签点位置信息,并针对多标签点同时定位情况下产生的冲突问题,设计了一套多标签点情况下的系统管理算 法,对系统进行有效管理。
1 系统模型
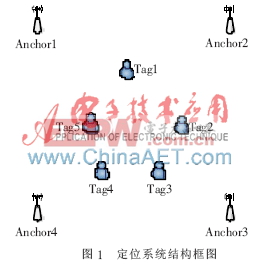
本文是基于多移动标签点情况下的定位方案,其系统的结构如图1所示。系统的组成包括4个固定锚节点(Anchor1、Anchor2、Anchor3和 Anchor4)、多个移动标签点(Tag1、Tag2及Tag3等)和定位服务器。4个锚节点固定在定位服务区域的4个固定坐标点上,定位区域内的移动 标签点处于对等关系,可以进行定位及相互间的数据通信。该系统使用一种改进的TOA测距算法——对称双边双向测距算法(SDS-TWR),利用该算法不需 要标签点和锚节点的时钟同步的优点,降低系统的实现难度[8]。系统工作时,当有移动标签点需要定位时,系统标签点依次向各个固定锚节点发出测距信号,固 定锚节点收到测距信号后,根据SDS-TWR算法产生相应的应答信号,与移动标签点完成测距。移动标签点分别与4个固定锚节点完成测距后,将距离信息通过 USB接口送入与其连接的定位服务器。由于各固定锚节点的坐标已知,定位服务器可以通过LLOP算法计算出移动标签的坐标,并进行显示。
2 硬件设计
目前,Chirp信号的调制与解调主要使用声表面波器件(SAW)完成,单独设计并完成一套Chirp信号发射机和接收机较为复杂,成本较高,并且不利 于硬件的集成化。本系统选用nanoPAN 5375射频收发模来完成基本的Chirp通信功能。nanoPAN 5375射频收发模块由德国nanotron公司生产,采用Chirp扩频技术,扩频带宽达到80 MHz,工作在2.4 GHz ISM频段,最高数据传输速率高达2 Mb/s。此外,其内部包含高精度的实时时钟和定时器,利于SDS-TWR测距算法的实现。nanoPAN 5375射频收发模内部完成了对射频信号的产生与处理,只需要通过SPI接口对其内部寄存器进行操作。系统的硬件结构可以分为移动标签点和锚节点两部分。
2.1 锚节点硬件设计
锚节点的硬件主要基于Atmega128 8 bit单片机和nanoPAN 5375射频收发模块。Atmega128属于AVR系列,具有低功耗、操作简单等特点,并且自带完整的SPI接口控制器,可以作为主机和从设备使用,能 够胜任锚节点中对nanoPAN 5375射频模块的控制及数据收发工作。nanoPAN 5375射频模块的ANT脚通过一条阻抗为50 ?赘的微带线与2.4 GHz天线连接,微带线的阻抗误差会对发射信号的功率产生影响。锚节点硬件结构框图如图2所示。

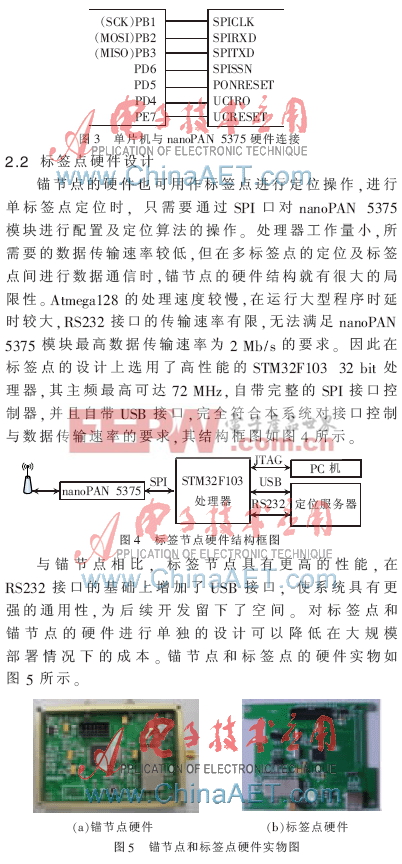
模拟信号的调制、解调和放大等处理都由nanoPAN 5375模块完成,并通过2.4 GHz天线进行收发。JTAG接口和RS232接口则用于系统的调试。Atmega128单片机通过SPI总线和几个控制端口对模块进行控制。 Atmega128单片机与nanoPAN 5375射频模块的连接如图3所示。SPICLK、SPIRXD、SPITXD、SPISSN分别为SPI总线的时钟、数据接收、数据发送和片选端口。通 过PONRESET引脚对模块进行复位,模块初始化前应通过该引脚对模块进行复位操作。UCIRQ和UCRESET分别为单片机中断和复位引脚。
3 系统软件设计
系统软件分为标签点/锚节点软件和定位服务器软件两部分。标签/锚节点软件完成SPI接口驱动、测距算法、测距结果返回和系统管理算法;定位服务器软件完成与标签点的接口驱动、数据处理计算和用户界面。
nanoPAN 5375模块的SPI接口的最高数据传输速率为16 Mb/s,接口的时序及数据模式可以通过寄存器进行设置。Atmega128和STM32F103处理器带有标准的SPI接口控制器,将它配置成主机模 式,数据格式设置为8 bit、大端模式,数据速率小于16 Mb/s。向nanoPAN 5375模块的0x00地址写入0x42,将模块的SPI接口设置成相同的模式。
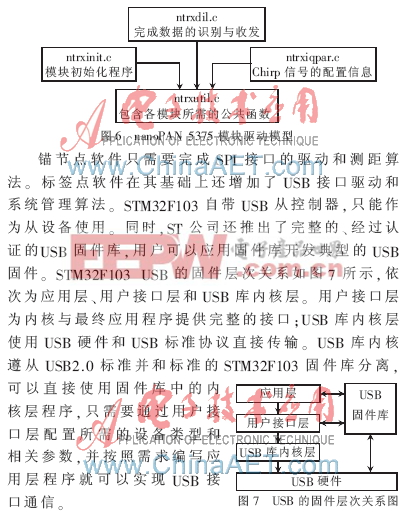
对nanoPAN 5375模块的控制程序主要包括ntrxinit.c、ntrxiqpar.c、ntrxdil.c和ntrxutil.c,它们的关系如图6所示。 ntrxinit.c和ntrxiqpar.c完成对模块硬件的初始化,包括寄存器、硬件接口、扩频带宽和传输速率的设定,本系统将带宽设置为80 MHz,数据传输速率设置为最高的2 Mb/s。ntrxdil.c完成数据的接收与发送、定位算法和中断响应等功能的具体实现函数。ntrxutil.c则封装了大量与模块操作相关的共用函 数,方便各模块的调用。
本系统使用的是对称双边双向测距算法,它相当于在被定义的时间内进行了两次TOA测量。TOA测距通过测量信号在两端点间的传输时间来测量距离,因此对 时间精度有着严格的要求,这意味着在两次TOA测量的过程中不允许发生因数据碰撞而引起的重传。这在单标签点的情况下是很容易实现的,但是在多标签点的环 境下就完全不同了。标签点必须进行统一的管理来避免碰撞的发生,且该管理算法必须保证整个系统的平等性与高效性。为了达到这一目标,设计了图8所示的定位 管理算法。
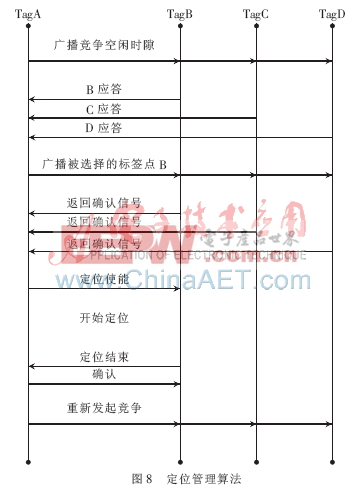
在系统内的众多标签节点中选择一个作为网络主协调控制器来控制标签节点和锚节点的时序。作为主协调控制器的标签节点周期性地发送广播包来发起空闲时隙的 竞争。每一个标签在收到广播信号后发送应答数据包竞争空闲时隙。作为主协调器的标签节点接收到应答信号后,根据竞争选举算法选出一个标签点,同时广播包含 选取结果的广播数据包。各标签点收到选举结果后返回确认信号,没有被选中的标签点进入等待状态,被选中的标签点和系统内的4个的锚节点分别进行测距。在被 选中的标签点完成测量之前,其余的标签点进入等待状态等待下一次的时隙。被选中的标签点完成测量后向作为主协调器的标签节点发送定位完成信号并进入等待模 式,主协调器标签点收到定位完成信号后,重新发起竞争。为了避免某个标签点被重复选取而造成的不平等,需要对标签点进行优先级管理。在编程中运用队列原 理,一个标签点完成定位后将其放入队尾,使其竞争优先级排到最低,从而避免重复分配造成的不平等。重复这些步骤直到所有的标签点完成测量。
定位服务器在系统中主要完成与标签点的接口驱动、数据处理计算和用户界面,通过USB接口接收标签点的距离数据,使用LLOP算法计算出移动标签的坐 标,并通过显示界面显示出标签点的相对位置信息。由于标签节点使用USB接口,具有很强的通用性,因此定位服务器可以为PC或其他的嵌入式系统。
4 定位结果分析
该系统的最大定位距离可以达到800 m,为了检验该系统的定位性能,分别将该系统在室内和室外两种环境下进行定位实验,定位结果如下。
4.1 室外环境定位
室外实验选用一个宽阔的球场,定位区域内无障碍物,4个锚节点放置在一个60 m×60 m的正方形区域的4个端点。将标签点放置在正方形区域内的多个已知坐标点上进行测量,部分定位结果如图9所示。

从图10可以看出,室内环境下的测量坐标和实际坐标有一定的误差,误差的大小也相差较大。在小于2 m的区域误差很大,这是由于在短距离条件下信号传播时间较短,干扰、时钟误差和定时器误差对测量结果的影响较大。大于2 m后的误差明显减小,有两个点的误差在20 cm以内,因此在中远距离情况下,该系统在室内环境下也具有较高的定位精度。
通过比较两种环境下的定位结果可以看出,在同为视距环境下,在室内定位精度与稳定性不如室外定位,这是因为室内环境受多径效应干扰更为严重。同时可以看 到,定位距离在3 m以上的中远距离定位的相对精度较高,这恰恰是实际室内定位应用中最常用的,因此,该系统具有较高的实用价值。
本文利用Chirp扩频信号抗干扰、抗多径能力强的特点,利用SDS-TWR测距算法,设计并实现了一个室内定位通信系统,并设计了一套系统管理算法实 现了对系统的管理,该系统在室外和室内都可以获得较高的定位精度。该系统结构简单,具有很强的通用性,可以作为单独的定位通信系统或者作为一个功能部件嵌 入到其他系统中,具有较广的应用前景。
参考文献
[1] 廖丁毅,王玫,郑霖,等.基于脉冲锁相环的超宽带定位接收机设计[J].桂林电子科技大学学报,2010,2(1):17-20.
[2] KIM J E, KANG J, KIM D, et al. IEEE 802.15.4a CSS-based localization system for wireless sensor networks[C]. IEEE Interational Conference on Mobile Adhoc and Sevor Systems, 2007:1-3.
[3] LEE C, KIN J Y. The positioning system based on IEEE 802.15.4a PHY and MAC protocol for low rate WPAN[C]. International Conference on Control, Automation and Systems, 2008:1462-1465.
[4] WINKLER M. Chirp signals for communications[C]. Wescon Convention Record, 1962.
[5] PINKNEY J. Low complexity indoor wireless data links using Chirp spread spectrum[D]. Calgary: Doctor Dissertation of the University of Calgary, 2003.
[6] BUSH H, MARTIN A R, COBB R F, et al. Application of Chirp SWD for spread spectrum communications[C]. Proceedings of the 1973 IEEE Ultrasonics Symposium, Monterey, IEEE Press, 1973:494-497.
[7] KWAK M, CHONG J. A new double two-way ranging algorithm for ranging system[C]. IEEE International Conference on Network Infrastructure and Digital Content, 2010:470-473.
[8] 刘林.无线定位基本概念与原理[J].学术动态,2007(4):11-17.

通信相关文章:通信原理









评论