飞机刹车模糊神经网络DSP嵌入式控制系统
如前所述,神经网络部分采用常用的BP算法,其具体的学习步骤如下:
(1)初始化,将各连接权值及阈值赋随机值;
(2)随机选取模式,计算各层的输入和输出;
(3)计算各层的一般化误差;
(4)更新各层的阈值及层之间的连接权值;
(5)下一个模式对输入网络进行训练,返回步骤(3),至全部模式训练完;
(6)判断是否需要循环学习。
当整个网络训练完后,学习结果记忆在权值和阈值中。
针对BP算法中存在的问题及刹车系统自身的特点,我们进行了改进。
3.2.1.1 活化函数的选取
在μ-σ曲线中,μ的取值存在着接近0的点,如果选取单极连续的S型函数 则接近0或1时收敛速度极慢,所以系统选取双极连续的S型函数
则接近0或1时收敛速度极慢,所以系统选取双极连续的S型函数 该函数在接近0处斜率最大,收敛最快,解决了网络的训练在0点处的收敛速度问题。
该函数在接近0处斜率最大,收敛最快,解决了网络的训练在0点处的收敛速度问题。
3.2.1.2 初始值的选择
由于曲线是非线性的,初始值对于学习是否达到局部最小和是否收敛影响很大。初始权值在输入累加时,每个节点的状态值接近0,保证开始时不落到活化函数的平坦区上。权值和阈值一般随机取值,该系统中两者初始值均取在(-1,+1)之间,对输入样本初始值进行归一化处理,使较大的输入仍落在活化函数梯度大的区域。
3.2.1.3 退火系数Q的选择
系统中加入了动量项,针对学习过程中易引起振荡的现象,加入退火系数来改变活化函数曲线形状,以改变接近0处的斜率,即活化函数为 从而可通过调节Q值消除振荡和发散现象。
从而可通过调节Q值消除振荡和发散现象。
3.2.1.4 BOOT设计
TMS320C54X DSP芯片一般都在片内设置有BOOT程序,其作用是开机时将程序从外部装入内部程序存储器。DSP芯片有多种BOOT方式,本系统采用8位并口BOOT方式。
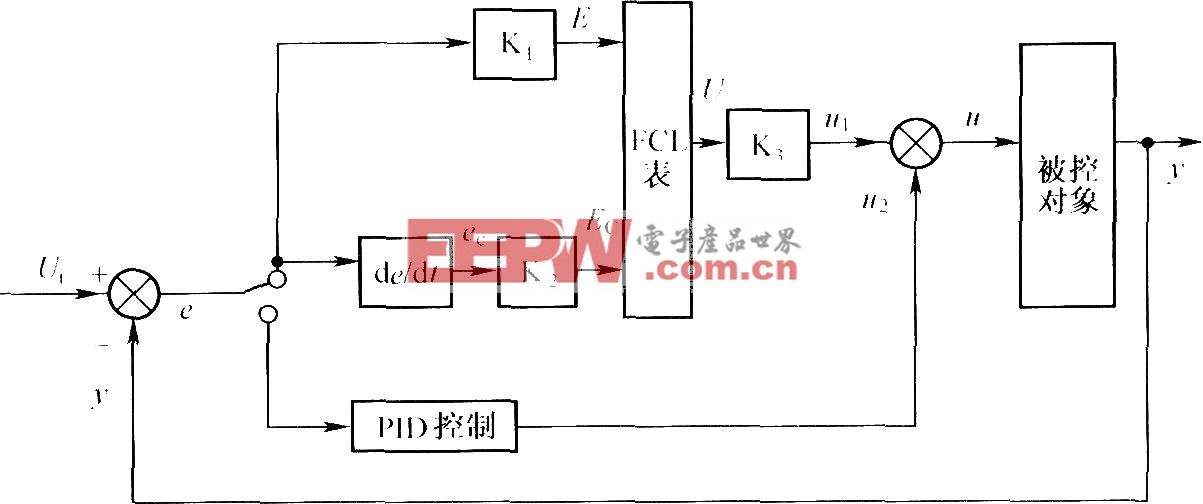
3.2.2 模糊控制部分
89C52收到DSP发的中断信号时,向DSP的HPI口发出读信号,读取DSP的处理结果。由89C52进行查表及反模糊化控制,最终将所得数字结果通过D/A转换器转换为所需的模拟电流控制信号。
模糊控制需进行三部分的工作:输入精确量的模糊化、模糊控制规则的推理合成运算和模糊量的精确化(反模糊化)。在实际应用中,考虑到单片机的特点,力求使其存储、变换和处理过程简单、快捷、节省内存,本文采用直接查表法。
查表法可归纳为以下四步的工作:
(1)确定输入量及输出量的论域;
(2)根据各论域所分级数n,将e、u变化范围分为n档,使每档与论域的某个元素相对应;
(3)查模糊控制表,得出控制量u,反模糊化;
(4)将控制量u乘以比例因子,施于被控对象。
模糊控制表格的生成是脱机进行的。表格生成后,存入单片机的ROM中,这样输入模糊化、模糊推理以及模糊量的精确化过程就可简化为查模糊控制表来实现。这种控制器结构简单、响应速度快、资源开支少,适于在单片机上实现。
4 试验结果及分析
通过实验和研究表明:采用新系统后,飞机防滑制动性能明显提高,制动距离、制动时间均减少。新系统的实验结果见图6。表1示出了新系统与原系统的比较结果,可以看出:
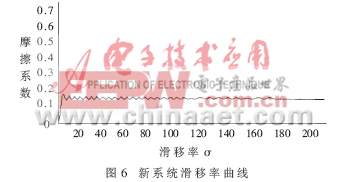

(1)新系统有效缩短滑跑距离,提高刹车效率,在湿跑道、积水跑道上更为明显;
(2)新系统在各种跑道上的减速率从高速到低速变化均在5%以内,明显小于原系统(最大达15%)。说明刹车力矩变化平稳;
(3)新系统的减速率在湿跑道和积水跑道均比原系统要大20%左右,干跑道也大6%;
(4)新系统的滑移率σ控制在0.15左右,刹车效能始终保持在最佳状态;
(5)新系统在各跑道上均未出现抱死现象,也消除了原系统的打滑逐渐加深的现象。
本系统通过应用智能控制领域的神经网络和模糊控制两个分支,改进了飞机刹车系统的控制算法,并通过DSP和单片机组成双机系统,不仅快速实时地实现了新一代飞机刹车系统的性能改进,而且将神经网络在硬件上实现,使神经网络等复杂算法不再只是停留在计算机仿真的阶段,而是有了切实可行的实现途径,为其在嵌入式系统中得到广泛的应用提供了新的方法。该系统的算法已经在微机上实现仿真,并且在硬件上得以实现,提高了原有飞机防滑刹车的效率和控制的鲁棒性。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)



评论