基于双计算机的仿人机器人的视觉跟踪系统
主程序模块与一般的Linux应用程序没有区别,它主要有以下几个功能:与信息处理系统通讯;向实时任务传送控制参数;实现人机交互,即将从实时任务传过来的电机转动数据和传感器数据输出到监视器上,同时将通过键盘输入的控制信号,实际上主程序模块主要实现控制台的作用,可以称之为控制台程序。
3.3运动控制过程
跟踪系统的控制目标是:根据图像处理获取的目标质心在图像平面中的位置,实时调整机器人头部的2个电机转动角度,将目标置于图像平面的中央位置。运动控制系统中一个控制循环大约需要3毫秒的时间。在信息处理系统中,处理一帧图像平均需要100毫秒左右的时间。由此可见,视觉处理的周期要远远大于运动控制的周期。因此在一个视觉处理周期之后,系统应该做好下一个视觉处理周期之内的运动规划,也就是做好后面多个控制周期之内的运动规划,这样才能保证机器人的头部以均匀、平缓,同时又是准确的速度来跟踪目标。
4 实验
在仿人机器人BHR1中,信息处理计算机的CPU为PⅣ2.4GHz,内存为512MB,运动控制计算机的CPU为PIII700MHz,内存为256MB。SVS系统的采集速度为15帧每秒,采集图像的大小为320×240像素。Memolink采用PCI接口,最大传输速率为1M bytes/s或1M words/s。
4.1 复杂背景下运动目标的跟踪。
在运动物体跟踪实验中,红色小球作为目标在机器人的视野中做单摆运动。为了验证基于多图像信息的目标识别算法,背景中放置了红色的方块和一个绿色的小球。实验结果如图5所示,第一行图像是实验场景,第二行图像是左摄像头的视频序列,结果表明彩色目标运动速度小于0.3m/s时,机器人头部仍可以很好地跟踪目标的运动,并使其始终位于左侧摄像机所采集到图像的中央位置。在复杂的非结构环境的室内背景下,利用单一的图像信息,系统很可能会跟踪失败。相同背景下,单一的颜色信息不能将红色的小球和背景中的红色方块区分开来。
图 5 复杂背景下彩色目标跟踪实验
图6显示了红色小球运动状态时的跟踪过程,图中的数据为实际数据的1/10抽样。可以看出,在X轴方向上,目标质心坐标到图像中心的偏差在±30个像素以内,在y轴方向上,目标质心坐标到图像中心的偏差在±20个像素内。实验说明在物体的运动过程中,跟踪系统能够实时跟踪物体并将物体的质心保持在左眼摄像机的中心。
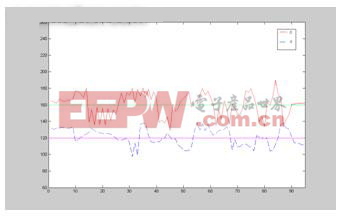
图6 目标在X、Y方向上的跟踪误差(像素)
5 结论
本文提出了基于Memolink通讯的双计算机的仿人机器人的视觉跟踪系统,系统能够满足仿人机器人实时视觉跟踪的性能要求。
在未知的复杂环境中,基于深度、颜色和模版匹配的多图像信息融合方案确保机器人稳定的从视频序列中分割出运动目标。
本文作者的创新点
本文提出并实现了一种基于MemoLink通讯的双计算机的视觉跟踪系统, 一台计算机负责视频信息的处理,另一台计算机负责机器人头部的运动控制,实现了仿人机器人头部对运动目标的实时跟踪。本文提出了一种集成深度、颜色和形状信息的逐步逼近目标区域的快速目标分割方法,实现了复杂背景下目标物体的稳定分割。










评论