基于嵌入式技术和CAN总线的车辆配电系统
该系统采用实时多任务操作系统μC/OS-Ⅱ作为配电管理器端的软件平台,μC/OS-Ⅱ源代码开放、内核小、移植方便,易于开发。并且该操作系统支持多任务并发运行,可以采用多任务编程方法。这样,配电管理器端的每个功能可以作为一个独立的任务来实现,这大大地增强了系统软件的可靠性、稳定性,也便于以后的维护和升级。同时配电管理器也提供了图形用户接口,结合键盘、LCD液晶显示和触摸屏模块为用户提供友好的人机交互界面。
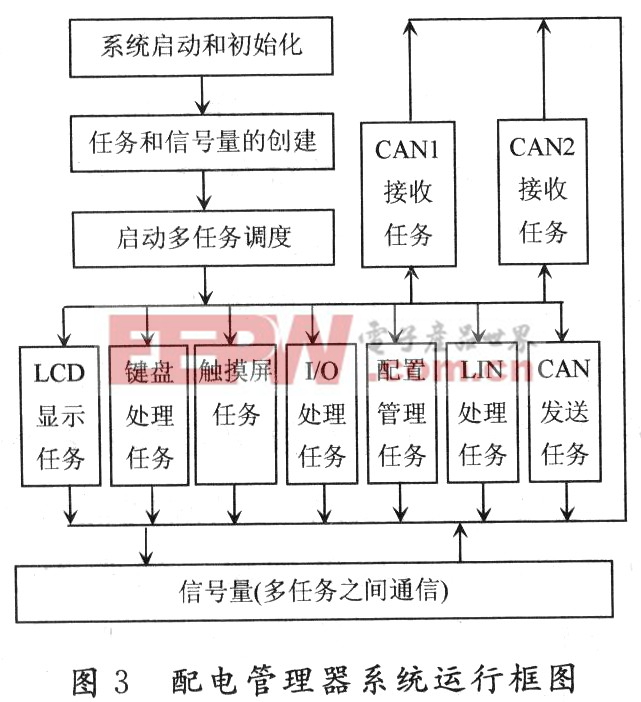
2.2.1 配电管理器应用软件设计
系统的工作流程主要是说明各个任务是如何协调工作。整个系统的运行过程如图3所示。本文引用地址:http://www.eepw.com.cn/article/152423.htm
嵌入式配电管理端的软件主要实现设备参数的读取和设定、人机交互功能、用电设备的监控功能、CAN、LIN通信数据传输等功能。设备参数的读取和设定功能提供了现场对设备参数的修改,也可以通过远程监测终端来修改。但是远程监控终端必须通过许可认证。认证的信息和设备参数保存在铁电FLASH存储器中,以便系统掉电后用户许可的信息不丢失。人机交互功能提供给用户监控现场设备的运行状态。该系统采用了4×4键盘、触摸屏和LCD显示作为系统信息的输入和输出接口,为用户提供非常友好的图形用户界面。用户可以通过人机交互接口对用电设备进行操作。
2.2.2 双CAN冗余实现的机制和原理
为了保证整车电气系统的数字化管理的稳定性和可靠性,在配电系统的对外通信接口采用性能稳定、工作可靠的CAN总线,同时,为了保证整车电气系统通信的可靠性和异常的处理,配电系统采用双冗余CAN总线。双CAN冗余通信流程图如图4所示。

CAN总线通信程序包括数据传输和总线管理两个功能块。数据传输模块实现的功能包括CAN初始化、CAN滤波的设计、CAN报文发送和CAN报文接收。
总线管理功能块实现的功能主要是总线检测,判断CAN是否存在故障,若有故障,则进入另一路总线检测;若冗余总线良好,则采用冗余总线通信。
CAN的通信数据分为命令数据的接收、命令的响应以及故障状态的自动上报。
命令数据的接收和处理主要接收车辆其他管理终端的命令,执行用电设备的综合管理。同时,配电管理器响应其他管理终端的执行结果和用电设备的运行状态。在配电管理器检测到用电设备故障时,自动上报给其他管理终端,以便实现车辆配电的综合管理和数字化。同时可以设定用电设备的优先级,配电管理器按照设定的优先级合理控制用电设备。
在向其他管理终端发送报文时,按CAN协议格式将报文内容填入CAN发送缓冲区,启动发送命令,将报文发送出去。如果不能成功发送,则进行总线故障处理,等待超时后自动调用冗余通道,用冗余通道来发送。如果冗余通道也出现故障,则进人故障处理,故障报警并退出。
3 结 语
该智能配电系统弥补了传统车辆配电系统的不足,利用嵌入式技术和双CAN冗余和LIN总线,同时结合LCD控制器和触摸屏为用户提供了友好的图形用户接口,利用μC/OS-Ⅱ实时多任务操作系统对任务进行合理的调度,实现整车配电系统的数字化和智能化,产品已经应用在特种车辆上,运行结果证明其性能稳定、可靠。








评论