基于ARM的嵌入式服务机器人控制器的研究
3 系统硬件设计
服务机器人控制系统的硬件平台设计至关重要。首先它是用户控制逻辑的具体执行者,服务机器人的各种控制功能必须通过硬件实现;其次它也是实时控制系统软件移植和运行的硬件环境。这里采用部件模块化,接口标准化,互换性、扩展性好,可靠性高的硬件设计原则。
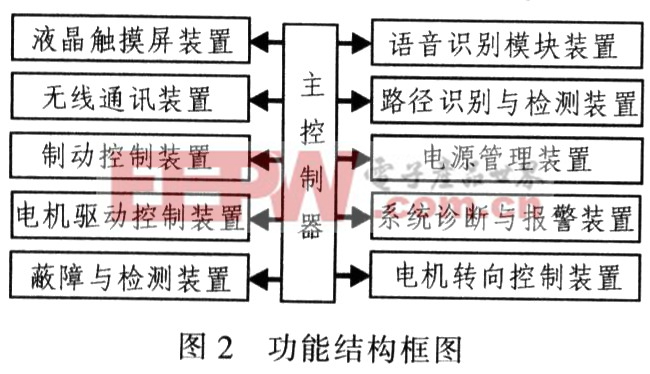
服务机器人控制系统主要用于实现控制服务机器人的导航、启动、停车、运行控制、路径规划、安全监控、远程控制计算机通讯及语音识别等功能。该控制系统主要由主控、导引、驱动、通讯、安全与辅助、语音识别、液晶触摸屏以及电源管理等单元组成。图2为其功能结构框图。
嵌入式处理器是整个硬件系统的核心元件,其性能好坏直接决定整个系统的运行效果,所提供功能的强弱直接决定嵌入式应用的适应范围和开发复杂度。嵌入式处理器一般具备以下特点:支持实时多任务操作系统;具有强存储区保护功能;处理器结构可扩展;功耗低。图3为基于ARM9的嵌入式系统的服务机器从主控制器模块结构。
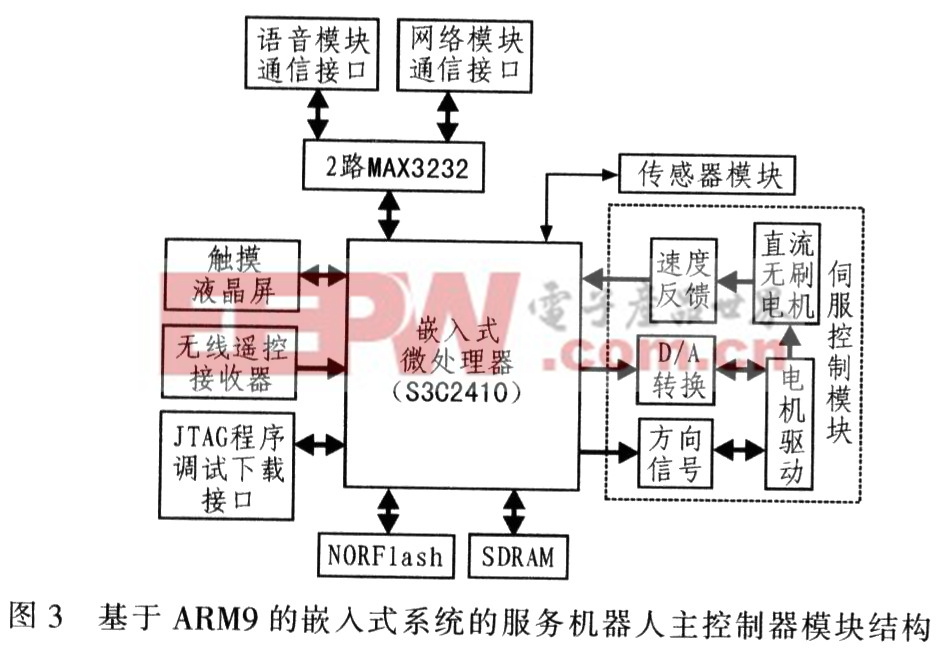
选用三星公司ARM9系列的S3C2410处理器作为服务机器人的控制CPU,在嵌入式系统μC/OS-II下实现机器人控制。S3C2410处理器采用 ARM920T内核,5级流水线指令结构,片内锁相环,内部时钟可达200 MHz,因此可用来进行复杂控制算法,提高控制精度。S3C2410有117个I/O口和24个外部中断源,内部具有丰富的接口控制器,如:USB控制器、DMA控制器、UART控制器、I2C控制器等,这样可简化外围电路,同时其内部时钟可达200 MHz,高性能指令集及可与C语言交叉汇编使其能完成复杂运算,提高服务机器人控制的实时性。
ARM处理器模块通过两个RS-232串口分别与传感器模块、伺服控制模块连接,RS-232串口均丁作在中断模式下,以保证系统的实时性。伺服控制模块与传感器模块均基于TI公司的TMS320LF2407型DSP,伺服模块可同时控制4路直流伺服电机,传感器模块可接24路超声传感器和24路红外传感器,模块在设计时充分考虑到降低成本和功耗,同时注重其实时性和可靠性。







评论