基于ARM 的浆果采摘机械手运动控制研究
2 控制系统硬件设计
机器人控制系统一般需要满足以下几个基本要求。
①控制系统的小型化、轻型化和模块化;
②控制系统的实时性;
③系统的稳定性和开放性。
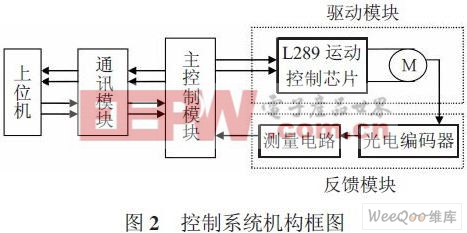
为此将本控制系统设计成由主控制模块、驱动模块和反馈模块三部分组成,如图2 所示。
2.1 主控制模块设计
为了能够满足机器人控制需求,同时兼顾机器人对控制器体积、重量、功耗等敏感特性的要求,主控制模块采用Samsung 公司基于ARM920T 核(适用于实时环境) 的低功耗、16/32bit、高性能的RISC 微处理器S3C2410,其主频为266MHz。操作系统则选用源码公开、专为ARM 设计,可靠性高的实时、多任务内核arm-Linux。
要使微处理器能够正常工作,必须对其外围进行扩展,图3 所示为实现整个ARM 主控制模块的硬件系统原理图。
电源模块负责为整个模块提供稳定、干净的直流电源。JTAG 调试单元用来实现程序的在线调试。串行通信模块则通过RS232 通讯标准实现主控制模块与上位机的通讯。为使系统能够运行较大的程序(如LINUX内核和文件系统),在微处理器外围扩展了32M 字节的SDRAM 内存芯片。扩展了16M 字节的FLASH 芯片作为程序和数据的存储设备,以保证掉电时程序和数据不会丢失。
2.2 驱动模块设计
本机器人系统采用直流电机控制,电机驱动芯片选用ST 公司的L298。L298 是ST 公司生产的一种高电压、大电流电机驱动芯片。该芯片的主要特点是工作电压高,输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;内含两个H 桥的高电压大电流全桥式驱动器,可用来驱动直流电动机、步进电动机、继电器和线圈等感性负载;采用标准TTL 逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作;有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可外接检测电阻,将变化量反馈给控制电路。












评论