基于机器视觉的嵌入式高速图像通信系统设计
3.2 CPLD控制程序设计
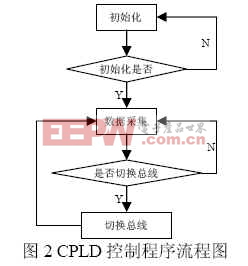
CPLD的作用是产生 CCD、A/D及 DSP视频端口的同步驱动脉冲。每次采样时, CPLD将从 SAA7111A接收到一帧图像数据保存到 SRAM中,此时 DSP等待;采样结束后, DSP与 CPLD进行总线切换,分别连接到与上次不同的 SRAM上,DSP开始读取数据,CPLD开始采集数据。每当 DSP和 CPLD 都完成各自的任务时,就进行总线切换 ,交换连接的 SRAM。此过程中由 CPLD控制程序的流程如图 2所示。本文引用地址:http://www.eepw.com.cn/article/152321.htm
3.3 USB的固件程序及驱动程序
固件程序在该系统中其主要功能是实现 USB芯片的初始化和配置;控制 USB芯片接收并处理 USB驱动程序请求;控制芯片接收控制程序的控制指令。固件程序首先初始化所有的内部状态变量,调用用户初始化函数 TD-Init(),初始化 USB总线设备接口为非配置状态,并打开中断。当完成上面的任务后,固件程序就开始重新枚举设备直到在端点收到 SETUP包为止。一旦 CY7C68013收到 SETUP包,固件程序就开始进行任务分配。固件程序流程图如图 3所示。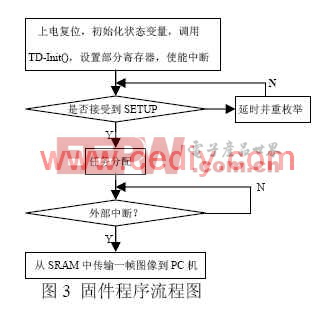
3.4 主机应用应用程序
在 PC机端,用 Visual C++ 6.0编写客户应用程序,应用程序通过 USB接收原始的奇数场和偶数场图像数据,待接收完奇数场和偶数场图像数据后,应用程序把它们组成完整的一帧图像,并且把该帧图像数据存储到硬盘上,然后把这帧图像转化成 BMP格式的图像存储在硬盘上,同时以 BMP的形式显示图像。
4 结论
从总体来看,该系统以嵌入式设备为核心平台,在此平台上完成了机器视觉、图像实时采集、数据传输 3个子系统的无缝连接集成开发。使得本系统只需较少的成本,拥有监测终端,就能完成主动智能监测、用户远程现场监控等功能。此外,本系统可针对不同需求,在添加各类相应的传感器后,将可运用到包括消防、车辆防盗以及工业控制等很多实用领域。
本文作者创新点 :介绍了 DSP与 CPLD协同控制的高速图像通信系统的设计,采用高速 USB2.0作为图像传输的接口,完成了机器视觉、图像实时采集、数据传输 3个子系统的无缝连接集成开发。








评论