基于嵌入式ARMS3C2440智能建筑物裂纹实时测量系统开发研究
图像分割的结果如图3所示。观察结果,很容易发现图像的边缘很大区域被错分为与裂缝一样。于是直接计算裂缝宽度时会导致将错分的区域计算成裂缝。因此除了计算裂缝宽度外,对候选裂缝集合进行有效剔除是另一个重要任务。对选裂缝集合进行有效剔除将会在下一小节中进行讨论。
分割完图像后,计算所有可能成为裂缝的区域的宽度。采用从图像给定行的起始位置开始计算裂缝宽度,当发现像素灰度由0变为255,记为一个裂缝的左边缘起始位置;当查找到像素灰度由255变为0,记为一个裂缝的右边缘结束位置。通过这种方法可以获取给定行的所有可能的裂缝宽度。但是在具体试验中发现,计算对单行的裂缝进行宽度测量还是存在比较大的误差。于是采用求取给定行上下5行共10行的平均值的方法。这样可以有效地去除毛刺的干扰。通过这种方法,得到一个裂缝的候选集合,并且计算出候选集合中每一个位置的宽度。
1.3 Sobel边缘检测
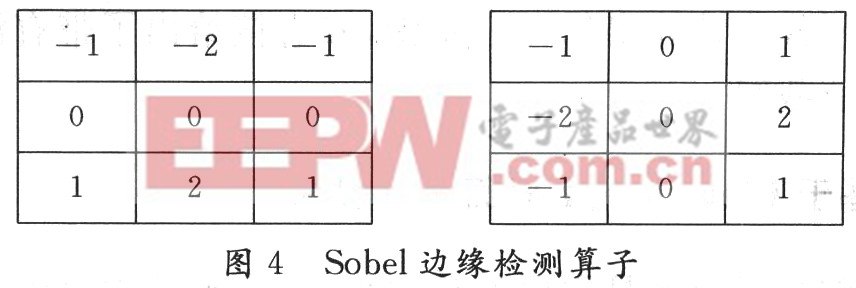
以上小节得出了裂缝的候选集合,但是事实上这个候选集合含有大量的非裂缝区域。这一节中的主要内容是设计算法剔除这些干扰裂缝,获取更小的裂缝候选集合。在试验中,由于裂缝具有明显的边缘,而干扰图像区域有比较模糊的边缘或者仅有一个边缘等,通过分析,提出采用Sobel边缘检测的方法进行裂缝位置的锁定。Sobel算子由两个卷积核组成,如图4所示,图像中的每个点都用这两个核做卷积,一个核对通常的垂直边缘相应最大,而另一个对水平边缘相应最大。两个卷积的最大值作为该点的输出位。运算结果是一幅边缘幅度图像。本文引用地址:http://www.eepw.com.cn/article/152205.htm
通过对原始图像采用Sobel边缘检测得到如图5所示结果。

但是,这个结果很明显存在很多微小的干扰,这些干扰必须予以剔除,否则将对锁定裂缝边缘没有任何效果。通过对边缘检测结果图像仔细分析发现,虽然存在微小干扰,但是他们的灰度值普遍偏小,针对这一发现,对缘检测结果图像做与上一节中一样的图像分割,这会将微小的干扰有效地剔除。实际的实验结果也验证了这一点,如图6所示。
同过对分割后的边缘图像进行观察,图像仍然存在一些微小的干扰,但这些干扰相对于未处理的缘检测结果图像已经很少,将在后续的处理中对图像裂缝添加附加约束,从而取出这些干扰的影响。
1.4 基于裂缝特征的附加约束
通过对大量的裂缝图像进行分析,发现图像裂缝有如下特点:
(1)裂缝灰度值低于墙体的灰度值。
(2)裂缝的宽度相对于整个图像不超过图像宽度的1/3。
(3)污染的墙体区域一般呈大的块状出现,且很多仅含有一个边界,另一边界延伸至图像外面。
(4)墙体的一些微小的干扰呈小块状出现。
(5)裂缝一般为带状。
使用ARM处理器处理图像,由于其速度慢且有实时性要求,故不能处理整张的图像,换句话说,必须处理局部图像。这就很明显增加了剔除候选裂缝的难度。该系统显然是无法使用特点(4)、特点(5)的。因此仅使用了前三个特点,并提出了约束:剔除宽度高于图像宽度1/3的裂缝候选集,剔除宽度低于1/10的裂缝候选集。








评论