AT90CAN单片机CAN通信模块介绍及软件编程
AT90CAN单片机的CAN控制器能够兼容CAN2.0A和CAN2.0B通信协议,内部设有120字节的邮箱空间,它由15个MOB(Message Object)与CAN DATA BUFFER组成。MOB用来描述一帧完整的CAN报文信息,每个MOB拥有独立的工作寄存器组(详见参考文献[1]),这些寄存器规定了CAN通信报文的帧格式与工作模式。CAN通用控制寄存器里的CANPAGE寄存器为15个MOB规定了相对应的BUFFER地址和指针,用来存放通信时发出或接收到的数据以及保存MOB寄存器组的设置。对MOB的寄存器组进行初始化设置后,CAN控制器根据MOB的不同设置,就可以分别实现数据的发送、接收以及过滤功能,整个工作过程不需要CPU干预,简化了软件代码的编写。而CPU通过访问CAN控制器状态寄存器或者由CAN控制器以中断的方式通知CPU,即可得到当前通信状态,从而大大节省了CPU的占用时间。
2 CAN控制器的初始化
要实现CAN通信,首先要对CAN控制器进行正确的初始化设置。初始化过程包括对CPU的引脚功能、CAN通信波特率、中断优先级和MOB寄存器的设置等。在编写驱动的过程中,需要注意的是在完成对CANPAGE寄存器的设置后,再进行MOB的设置;否则,MOB的初始值将不能被保存,导致系统初始化失败。
其基本初始化流程如图1所示。其中阴影部分是必须初始化的部分,其他部分可以根据实际程序功能的需要予以设置。
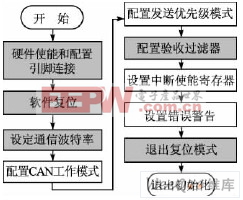
图1 CAN控制器初始化流程
CAN控制器初始化程序:
#define CAN_PORT_INPIND
#define CAN_PORT_DIR DDRD
#define CAN_PORT_OUT PORTD
#define CAN_INPUT_PIN6
#define CAN_OUTPUT_PIN5
void CAN_INIT() {
CAN_PORT_DIR = ~(1CAN_INPUT_PIN );
CAN_PORT_DIR = ~(1CAN_OUTPUT_PIN);
CAN_PORT_OUT |=(1CAN_INPUT_PIN );
CAN_PORT_OUT |=(1CAN_OUTPUT_PIN);//配置单片机TD、RD引脚功能
CANTCON=0x00;//CAN时钟寄存器清零
CANGCON |= 0x01;//软件复位
CANBT1=0x06;
CANBT2=0x2a;
CANBT3=0x13;//设置通信波特率为250kbps
CANIE2 |= 0x60;//使能MOB5、MOB6
CANIE1 |= 0x01;//使能MOB0
CANGIE = 0xA0; //使能CAN中断
CANGCON |= 0x02;//CAN控制器启动
}
3 AT90CAN单片机与PC机CAN通信实例
下面以如何实现AT90CAN单片机与PC机间的CAN通信为例,进一步说明AT90CAN单片机的CAN功能模块驱动的编制流程,如图2所示,并给出C语言编写的CAN通信程序。它的功能是接收PC机经由专用的PCICAN模块扩展的CAN接口发出的数据,并将收到的数据与验收过滤器寄存器中设定的ID值比较。如果ID值相符,则将数据重新编制ID后发给PC机。
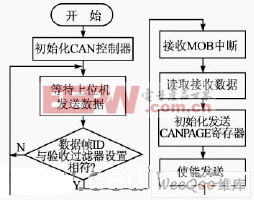
图2 与PC机CAN通信软件流程











评论