基于SEP3203拉力试验机嵌入式测控系统设计
摘要:针对材料试验机测控系统要求精度高,实时性好的特性,提出一种基于32位的ARM微处理器SEP3203和实时操作系统μC/OS-Ⅱ的电子万能试验机测控系统开发方案。其中,触摸屏与LCD合为一体,采用AC97+UCB1400的工作方式来完成图形用户界面的设计;利用24位的CS5530芯片来完成数据模拟量的采集。在硬件平台基础上,选用μC/OS-Ⅱ作为控制器的操作系统,完成软件的结构化设计,通过移植μC/GUI,实现控制器的人机接口功能。
关键词:万能试验机;ARM微处理器;μC/OS-Ⅱ;CS5530;SEP3203
0 引言
万能材料试验机是测定材料机械性能的基本设备之一,主要用作对金属、橡胶、塑料、陶瓷和水泥等材料的拉伸、压缩、弯曲和剪切等机械性能的试验,可完成对材料的强度、塑性、弹性及韧性的检测。随着国际化的不断深入,国内外材料试验机的发展主要呈现出计算机化、数据处理全面化、控制精确化、全面化的特点。
当前万能材料试验机测控系统的开发具有一定的复杂性,要在尽可能小的空间中集成数据采集、处理,人机界面,串行通信等多个功能。传统的单片机由于功能单一,往往无法满足要求,或者即使可以实现,也需要使用大量的MCU协同工作,在信号连接、编程和减少体积方面,都会遇到不小的困难。在裸机上直接开发运行前后台系统的开发、维护和扩展都很困难,而且这样的系统本质上是一个程序超循环,根本无法保证测控系统的实时性要求。
万能材料试验机测控系统不但要求系统能够及时响应随机发生的外部事件,对其进行快速处理,还需要同时执行多个任务,并对每个任务实时响应。如果使用嵌入式系统技术,则可以使用单片嵌入式CPU,集成多种功能,逐步解决存在的问题。
本文就是基于这样的背景,提出一种基于SEP3203处理器和实时操作系统μC/OS-Ⅱ的高精度万能材料试验机测控系统的实现。
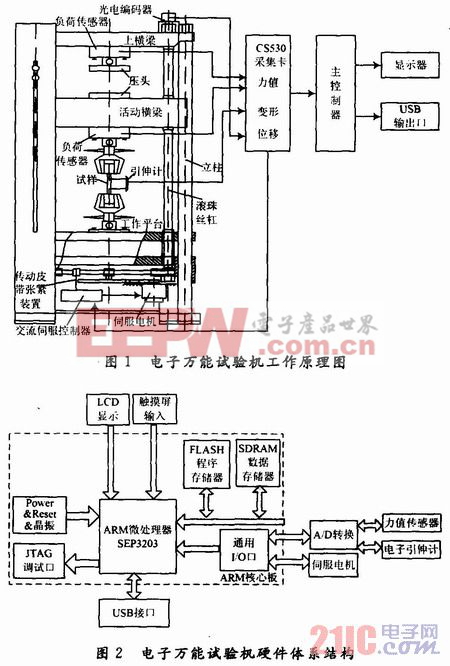
1 系统工作原理
试验机利用控制器,先经交流伺服单元控制电机运转,再经精密减速器减速后,通过反齿隙游移螺帽由电机带动双螺旋丝杠副,驱动动横梁上下移动,从而实现对试样的加载过程,完成试样的拉伸、压缩等力学性能试验。它的工作原理如图1所示。在做拉力试验或者其他试验时,由于试验机的负荷传感器与试样失去平衡,电桥产生一个弱小的不平衡电压输出。该电压在一定范围内与作用力的大小呈线性正比例关系。然而试样在负荷作用下引起的变形量则通过电子引伸计获得。负荷传感器和电子引伸计输出的小信号都经测量单元放大处理后,送给控制器数据采集输入端进行数据处理,得到力和变形量值,同时绘制出力和变形等特征曲线。此外,动横梁的位移则通过安装在电机转轴上的光电编码器数字测量获得。







评论